 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEliciting Compatible Demonstrations for Multi-Human Imitation Learning
Paper and Code
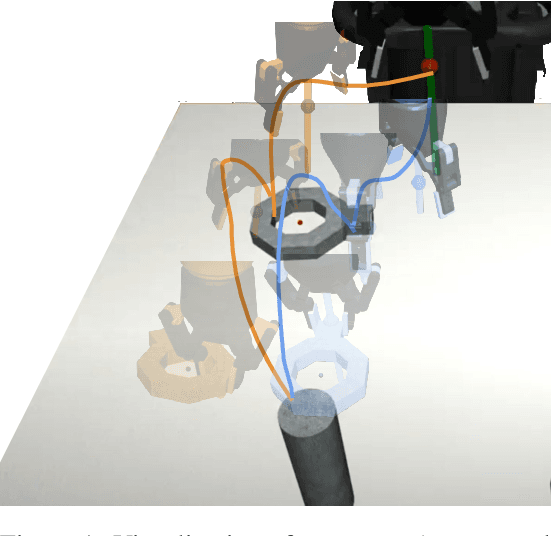

Imitation learning from human-provided demonstrations is a strong approach for learning policies for robot manipulation. While the ideal dataset for imitation learning is homogenous and low-variance -- reflecting a single, optimal method for performing a task -- natural human behavior has a great deal of heterogeneity, with several optimal ways to demonstrate a task. This multimodality is inconsequential to human users, with task variations manifesting as subconscious choices; for example, reaching down, then across to grasp an object, versus reaching across, then down. Yet, this mismatch presents a problem for interactive imitation learning, where sequences of users improve on a policy by iteratively collecting new, possibly conflicting demonstrations. To combat this problem of demonstrator incompatibility, this work designs an approach for 1) measuring the compatibility of a new demonstration given a base policy, and 2) actively eliciting more compatible demonstrations from new users. Across two simulation tasks requiring long-horizon, dexterous manipulation and a real-world "food plating" task with a Franka Emika Panda arm, we show that we can both identify incompatible demonstrations via post-hoc filtering, and apply our compatibility measure to actively elicit compatible demonstrations from new users, leading to improved task success rates across simulated and real environments.