 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"No, to the Right" -- Online Language Corrections for Robotic Manipulation via Shared Autonomy
Jan 06, 2023
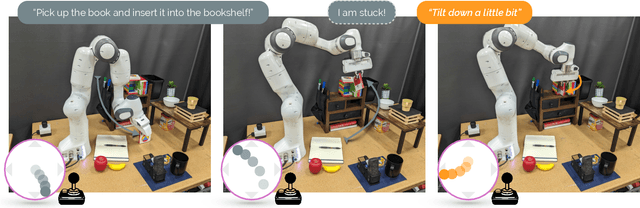
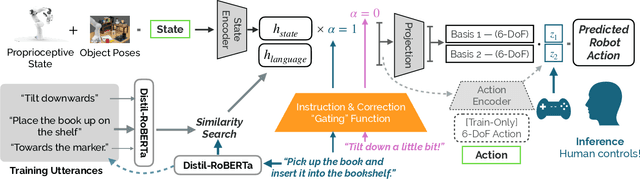
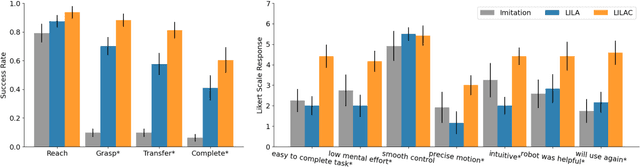
Systems for language-guided human-robot interaction must satisfy two key desiderata for broad adoption: adaptivity and learning efficiency. Unfortunately, existing instruction-following agents cannot adapt, lacking the ability to incorporate online natural language supervision, and even if they could, require hundreds of demonstrations to learn even simple policies. In this work, we address these problems by presenting Language-Informed Latent Actions with Corrections (LILAC), a framework for incorporating and adapting to natural language corrections - "to the right," or "no, towards the book" - online, during execution. We explore rich manipulation domains within a shared autonomy paradigm. Instead of discrete turn-taking between a human and robot, LILAC splits agency between the human and robot: language is an input to a learned model that produces a meaningful, low-dimensional control space that the human can use to guide the robot. Each real-time correction refines the human's control space, enabling precise, extended behaviors - with the added benefit of requiring only a handful of demonstrations to learn. We evaluate our approach via a user study where users work with a Franka Emika Panda manipulator to complete complex manipulation tasks. Compared to existing learned baselines covering both open-loop instruction following and single-turn shared autonomy, we show that our corrections-aware approach obtains higher task completion rates, and is subjectively preferred by users because of its reliability, precision, and ease of use.