 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVAMOS: A Hierarchical Vision-Language-Action Model for Capability-Modulated and Steerable Navigation
Oct 23, 2025A fundamental challenge in robot navigation lies in learning policies that generalize across diverse environments while conforming to the unique physical constraints and capabilities of a specific embodiment (e.g., quadrupeds can walk up stairs, but rovers cannot). We propose VAMOS, a hierarchical VLA that decouples semantic planning from embodiment grounding: a generalist planner learns from diverse, open-world data, while a specialist affordance model learns the robot's physical constraints and capabilities in safe, low-cost simulation. We enabled this separation by carefully designing an interface that lets a high-level planner propose candidate paths directly in image space that the affordance model then evaluates and re-ranks. Our real-world experiments show that VAMOS achieves higher success rates in both indoor and complex outdoor navigation than state-of-the-art model-based and end-to-end learning methods. We also show that our hierarchical design enables cross-embodied navigation across legged and wheeled robots and is easily steerable using natural language. Real-world ablations confirm that the specialist model is key to embodiment grounding, enabling a single high-level planner to be deployed across physically distinct wheeled and legged robots. Finally, this model significantly enhances single-robot reliability, achieving 3X higher success rates by rejecting physically infeasible plans. Website: https://vamos-vla.github.io/
Long Range Navigator (LRN): Extending robot planning horizons beyond metric maps
Apr 17, 2025A robot navigating an outdoor environment with no prior knowledge of the space must rely on its local sensing to perceive its surroundings and plan. This can come in the form of a local metric map or local policy with some fixed horizon. Beyond that, there is a fog of unknown space marked with some fixed cost. A limited planning horizon can often result in myopic decisions leading the robot off course or worse, into very difficult terrain. Ideally, we would like the robot to have full knowledge that can be orders of magnitude larger than a local cost map. In practice, this is intractable due to sparse sensing information and often computationally expensive. In this work, we make a key observation that long-range navigation only necessitates identifying good frontier directions for planning instead of full map knowledge. To this end, we propose Long Range Navigator (LRN), that learns an intermediate affordance representation mapping high-dimensional camera images to `affordable' frontiers for planning, and then optimizing for maximum alignment with the desired goal. LRN notably is trained entirely on unlabeled ego-centric videos making it easy to scale and adapt to new platforms. Through extensive off-road experiments on Spot and a Big Vehicle, we find that augmenting existing navigation stacks with LRN reduces human interventions at test-time and leads to faster decision making indicating the relevance of LRN. https://personalrobotics.github.io/lrn
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
Multi-Sample Long Range Path Planning under Sensing Uncertainty for Off-Road Autonomous Driving
Mar 17, 2024We focus on the problem of long-range dynamic replanning for off-road autonomous vehicles, where a robot plans paths through a previously unobserved environment while continuously receiving noisy local observations. An effective approach for planning under sensing uncertainty is determinization, where one converts a stochastic world into a deterministic one and plans under this simplification. This makes the planning problem tractable, but the cost of following the planned path in the real world may be different than in the determinized world. This causes collisions if the determinized world optimistically ignores obstacles, or causes unnecessarily long routes if the determinized world pessimistically imagines more obstacles. We aim to be robust to uncertainty over potential worlds while still achieving the efficiency benefits of determinization. We evaluate algorithms for dynamic replanning on a large real-world dataset of challenging long-range planning problems from the DARPA RACER program. Our method, Dynamic Replanning via Evaluating and Aggregating Multiple Samples (DREAMS), outperforms other determinization-based approaches in terms of combined traversal time and collision cost. https://sites.google.com/cs.washington.edu/dreams/
SoRTS: Learned Tree Search for Long Horizon Social Robot Navigation
Sep 22, 2023



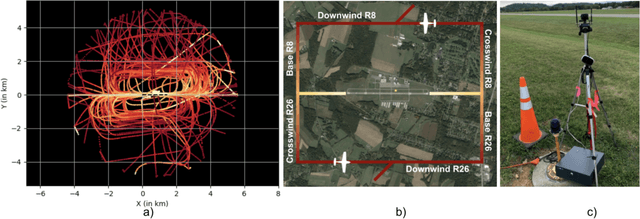
The fast-growing demand for fully autonomous robots in shared spaces calls for the development of trustworthy agents that can safely and seamlessly navigate in crowded environments. Recent models for motion prediction show promise in characterizing social interactions in such environments. Still, adapting them for navigation is challenging as they often suffer from generalization failures. Prompted by this, we propose Social Robot Tree Search (SoRTS), an algorithm for safe robot navigation in social domains. SoRTS aims to augment existing socially aware motion prediction models for long-horizon navigation using Monte Carlo Tree Search. We use social navigation in general aviation as a case study to evaluate our approach and further the research in full-scale aerial autonomy. In doing so, we introduce XPlaneROS, a high-fidelity aerial simulator that enables human-robot interaction. We use XPlaneROS to conduct a first-of-its-kind user study where 26 FAA-certified pilots interact with a human pilot, our algorithm, and its ablation. Our results, supported by statistical evidence, show that SoRTS exhibits a comparable performance to competent human pilots, significantly outperforming its ablation. Finally, we complement these results with a broad set of self-play experiments to showcase our algorithm's performance in scenarios with increasing complexity.
Learned Tree Search for Long-Horizon Social Robot Navigation in Shared Airspace
Apr 04, 2023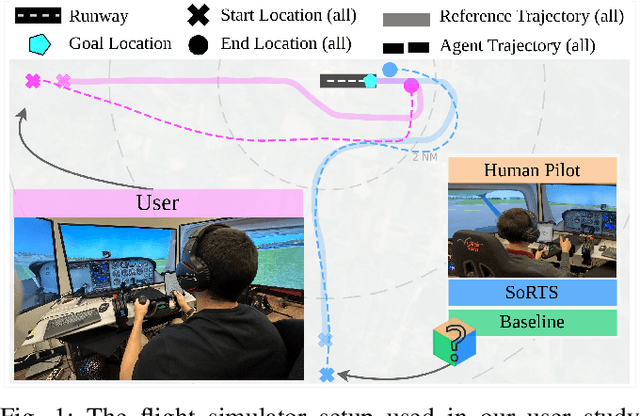
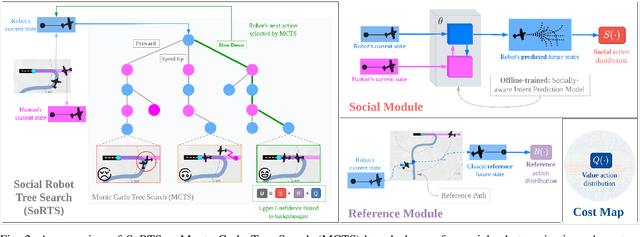
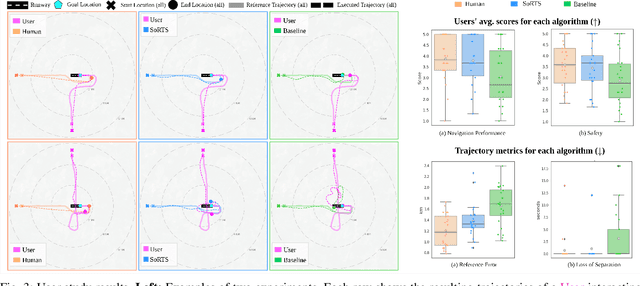
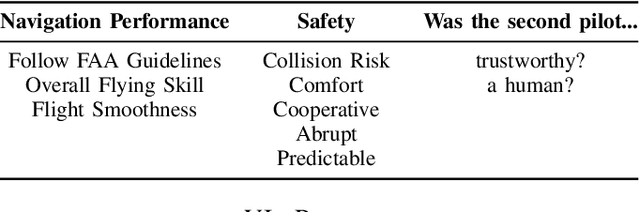
The fast-growing demand for fully autonomous aerial operations in shared spaces necessitates developing trustworthy agents that can safely and seamlessly navigate in crowded, dynamic spaces. In this work, we propose Social Robot Tree Search (SoRTS), an algorithm for the safe navigation of mobile robots in social domains. SoRTS aims to augment existing socially-aware trajectory prediction policies with a Monte Carlo Tree Search planner for improved downstream navigation of mobile robots. To evaluate the performance of our method, we choose the use case of social navigation for general aviation. To aid this evaluation, within this work, we also introduce X-PlaneROS, a high-fidelity aerial simulator, to enable more research in full-scale aerial autonomy. By conducting a user study based on the assessments of 26 FAA certified pilots, we show that SoRTS performs comparably to a competent human pilot, significantly outperforming our baseline algorithm. We further complement these results with self-play experiments in scenarios with increasing complexity.
Challenges in Close-Proximity Safe and Seamless Operation of Manned and Unmanned Aircraft in Shared Airspace
Nov 13, 2022


We propose developing an integrated system to keep autonomous unmanned aircraft safely separated and behave as expected in conjunction with manned traffic. The main goal is to achieve safe manned-unmanned vehicle teaming to improve system performance, have each (robot/human) teammate learn from each other in various aircraft operations, and reduce the manning needs of manned aircraft. The proposed system anticipates and reacts to other aircraft using natural language instructions and can serve as a co-pilot or operate entirely autonomously. We point out the main technical challenges where improvements on current state-of-the-art are needed to enable Visual Flight Rules to fully autonomous aerial operations, bringing insights to these critical areas. Furthermore, we present an interactive demonstration in a prototypical scenario with one AI pilot and one human pilot sharing the same terminal airspace, interacting with each other using language, and landing safely on the same runway. We also show a demonstration of a vision-only aircraft detection system.