 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Surface-to-Air Missile Engagement Zone Prediction Using Simulation and Machine Learning
Dec 05, 2023Surface-to-Air Missiles (SAMs) are crucial in modern air defense systems. A critical aspect of their effectiveness is the Engagement Zone (EZ), the spatial region within which a SAM can effectively engage and neutralize a target. Notably, the EZ is intrinsically related to the missile's maximum range; it defines the furthest distance at which a missile can intercept a target. The accurate computation of this EZ is essential but challenging due to the dynamic and complex factors involved, which often lead to high computational costs and extended processing times when using conventional simulation methods. In light of these challenges, our study investigates the potential of machine learning techniques, proposing an approach that integrates machine learning with a custom-designed simulation tool to train supervised algorithms. We leverage a comprehensive dataset of pre-computed SAM EZ simulations, enabling our model to accurately predict the SAM EZ for new input parameters. It accelerates SAM EZ simulations, enhances air defense strategic planning, and provides real-time insights, improving SAM system performance. The study also includes a comparative analysis of machine learning algorithms, illuminating their capabilities and performance metrics and suggesting areas for future research, highlighting the transformative potential of machine learning in SAM EZ simulations.
SoRTS: Learned Tree Search for Long Horizon Social Robot Navigation
Sep 22, 2023



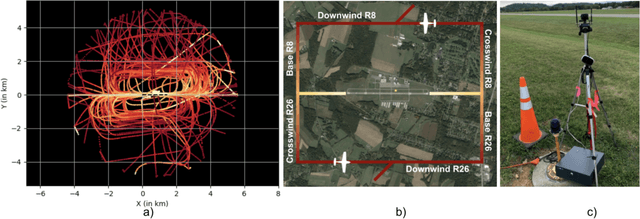
The fast-growing demand for fully autonomous robots in shared spaces calls for the development of trustworthy agents that can safely and seamlessly navigate in crowded environments. Recent models for motion prediction show promise in characterizing social interactions in such environments. Still, adapting them for navigation is challenging as they often suffer from generalization failures. Prompted by this, we propose Social Robot Tree Search (SoRTS), an algorithm for safe robot navigation in social domains. SoRTS aims to augment existing socially aware motion prediction models for long-horizon navigation using Monte Carlo Tree Search. We use social navigation in general aviation as a case study to evaluate our approach and further the research in full-scale aerial autonomy. In doing so, we introduce XPlaneROS, a high-fidelity aerial simulator that enables human-robot interaction. We use XPlaneROS to conduct a first-of-its-kind user study where 26 FAA-certified pilots interact with a human pilot, our algorithm, and its ablation. Our results, supported by statistical evidence, show that SoRTS exhibits a comparable performance to competent human pilots, significantly outperforming its ablation. Finally, we complement these results with a broad set of self-play experiments to showcase our algorithm's performance in scenarios with increasing complexity.
Autonomous Agent for Beyond Visual Range Air Combat: A Deep Reinforcement Learning Approach
Apr 19, 2023
This work contributes to developing an agent based on deep reinforcement learning capable of acting in a beyond visual range (BVR) air combat simulation environment. The paper presents an overview of building an agent representing a high-performance fighter aircraft that can learn and improve its role in BVR combat over time based on rewards calculated using operational metrics. Also, through self-play experiments, it expects to generate new air combat tactics never seen before. Finally, we hope to examine a real pilot's ability, using virtual simulation, to interact in the same environment with the trained agent and compare their performances. This research will contribute to the air combat training context by developing agents that can interact with real pilots to improve their performances in air defense missions.
Learned Tree Search for Long-Horizon Social Robot Navigation in Shared Airspace
Apr 04, 2023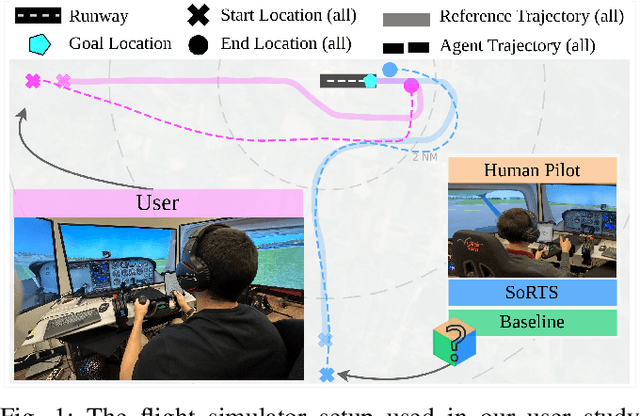
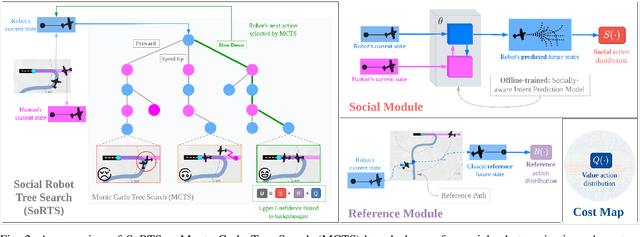
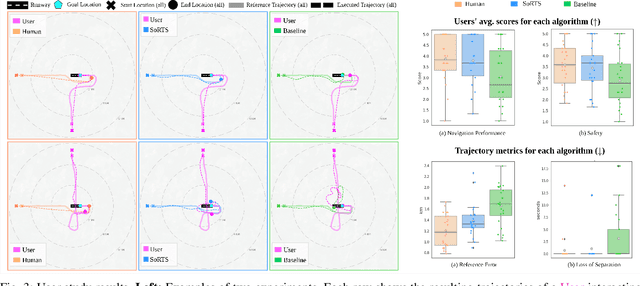
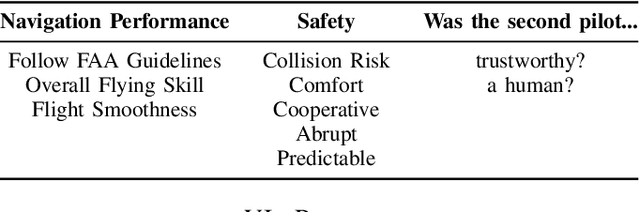
The fast-growing demand for fully autonomous aerial operations in shared spaces necessitates developing trustworthy agents that can safely and seamlessly navigate in crowded, dynamic spaces. In this work, we propose Social Robot Tree Search (SoRTS), an algorithm for the safe navigation of mobile robots in social domains. SoRTS aims to augment existing socially-aware trajectory prediction policies with a Monte Carlo Tree Search planner for improved downstream navigation of mobile robots. To evaluate the performance of our method, we choose the use case of social navigation for general aviation. To aid this evaluation, within this work, we also introduce X-PlaneROS, a high-fidelity aerial simulator, to enable more research in full-scale aerial autonomy. By conducting a user study based on the assessments of 26 FAA certified pilots, we show that SoRTS performs comparably to a competent human pilot, significantly outperforming our baseline algorithm. We further complement these results with self-play experiments in scenarios with increasing complexity.
Challenges in Close-Proximity Safe and Seamless Operation of Manned and Unmanned Aircraft in Shared Airspace
Nov 13, 2022


We propose developing an integrated system to keep autonomous unmanned aircraft safely separated and behave as expected in conjunction with manned traffic. The main goal is to achieve safe manned-unmanned vehicle teaming to improve system performance, have each (robot/human) teammate learn from each other in various aircraft operations, and reduce the manning needs of manned aircraft. The proposed system anticipates and reacts to other aircraft using natural language instructions and can serve as a co-pilot or operate entirely autonomously. We point out the main technical challenges where improvements on current state-of-the-art are needed to enable Visual Flight Rules to fully autonomous aerial operations, bringing insights to these critical areas. Furthermore, we present an interactive demonstration in a prototypical scenario with one AI pilot and one human pilot sharing the same terminal airspace, interacting with each other using language, and landing safely on the same runway. We also show a demonstration of a vision-only aircraft detection system.
Supervised Machine Learning for Effective Missile Launch Based on Beyond Visual Range Air Combat Simulations
Jul 09, 2022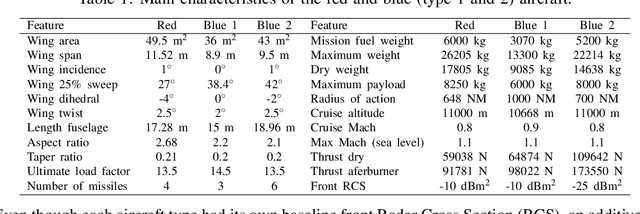
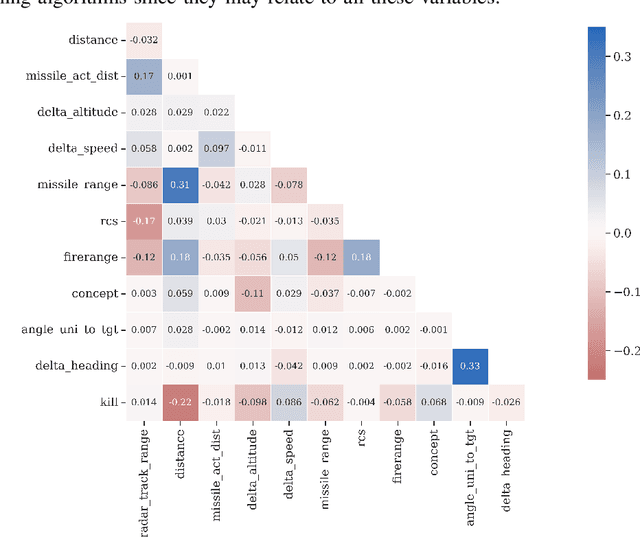
This work compares supervised machine learning methods using reliable data from constructive simulations to estimate the most effective moment for launching missiles during air combat. We employed resampling techniques to improve the predictive model, analyzing accuracy, precision, recall, and f1-score. Indeed, we could identify the remarkable performance of the models based on decision trees and the significant sensitivity of other algorithms to resampling techniques. The models with the best f1-score brought values of 0.379 and 0.465 without and with the resampling technique, respectively, which is an increase of 22.69%. Thus, if desirable, resampling techniques can improve the model's recall and f1-score with a slight decline in accuracy and precision. Therefore, through data obtained through constructive simulations, it is possible to develop decision support tools based on machine learning models, which may improve the flight quality in BVR air combat, increasing the effectiveness of offensive missions to hit a particular target.
Weapon Engagement Zone Maximum Launch Range Estimation Using a Deep Neural Network
Nov 17, 2021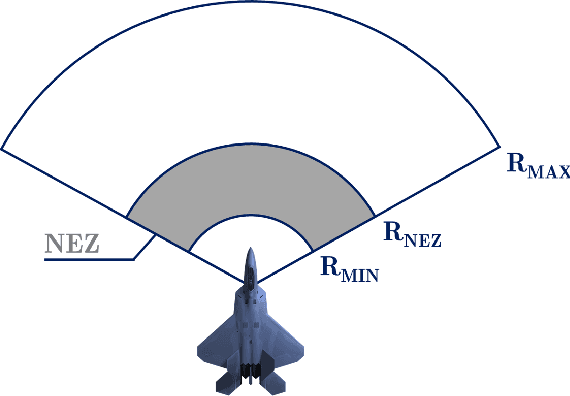
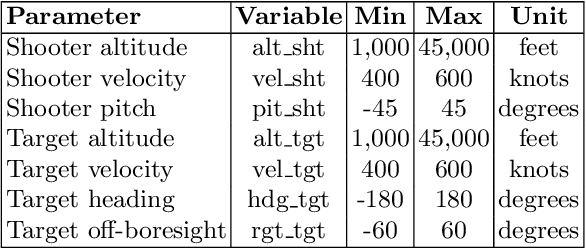
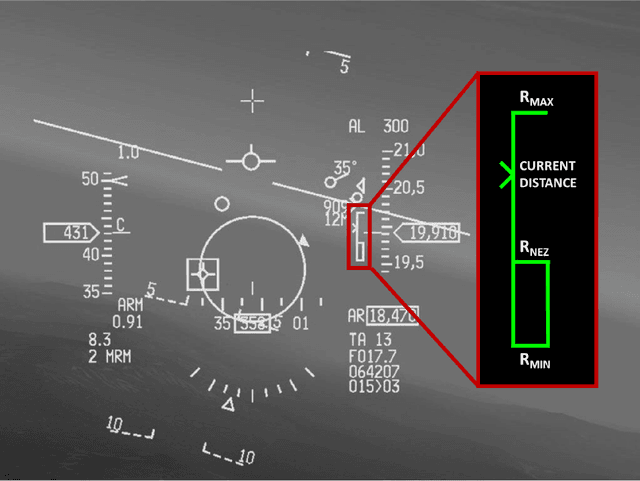
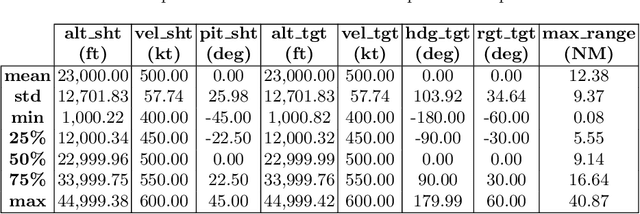
This work investigates the use of a Deep Neural Network (DNN) to perform an estimation of the Weapon Engagement Zone (WEZ) maximum launch range. The WEZ allows the pilot to identify an airspace in which the available missile has a more significant probability of successfully engaging a particular target, i.e., a hypothetical area surrounding an aircraft in which an adversary is vulnerable to a shot. We propose an approach to determine the WEZ of a given missile using 50,000 simulated launches in variate conditions. These simulations are used to train a DNN that can predict the WEZ when the aircraft finds itself on different firing conditions, with a coefficient of determination of 0.99. It provides another procedure concerning preceding research since it employs a non-discretized model, i.e., it considers all directions of the WEZ at once, which has not been done previously. Additionally, the proposed method uses an experimental design that allows for fewer simulation runs, providing faster model training.
Engagement Decision Support for Beyond Visual Range Air Combat
Nov 17, 2021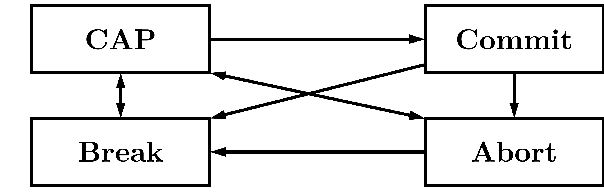
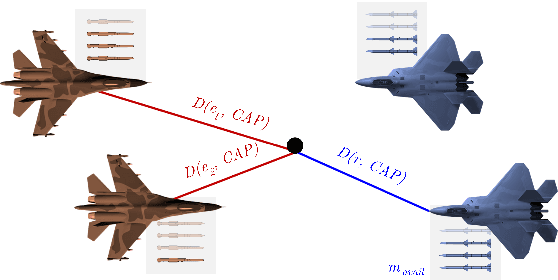
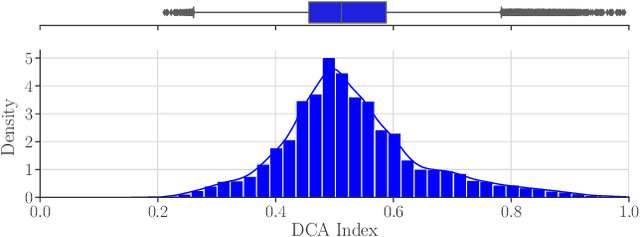
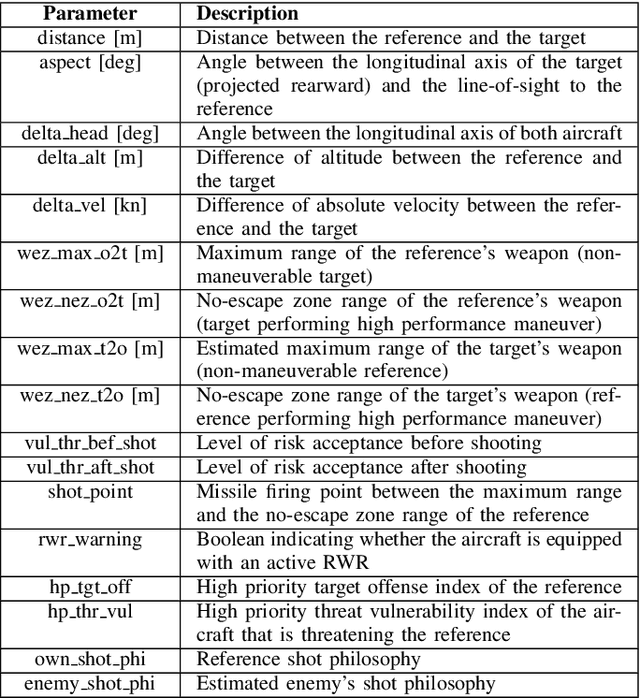
This work aims to provide an engagement decision support tool for Beyond Visual Range (BVR) air combat in the context of Defensive Counter Air (DCA) missions. In BVR air combat, engagement decision refers to the choice of the moment the pilot engages a target by assuming an offensive stance and executing corresponding maneuvers. To model this decision, we use the Brazilian Air Force's Aerospace Simulation Environment (Ambiente de Simula\c{c}\~ao Aeroespacial - ASA in Portuguese), which generated 3,729 constructive simulations lasting 12 minutes each and a total of 10,316 engagements. We analyzed all samples by an operational metric called the DCA index, which represents, based on the experience of subject matter experts, the degree of success in this type of mission. This metric considers the distances of the aircraft of the same team and the opposite team, the point of Combat Air Patrol, and the number of missiles used. By defining the engagement status right before it starts and the average of the DCA index throughout the engagement, we create a supervised learning model to determine the quality of a new engagement. An algorithm based on decision trees, working with the XGBoost library, provides a regression model to predict the DCA index with a coefficient of determination close to 0.8 and a Root Mean Square Error of 0.05 that can furnish parameters to the BVR pilot to decide whether or not to engage. Thus, using data obtained through simulations, this work contributes by building a decision support system based on machine learning for BVR air combat.