 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstrating ViSafe: Vision-enabled Safety for High-speed Detect and Avoid
May 08, 2025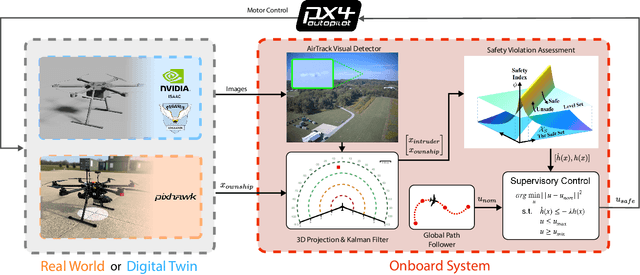
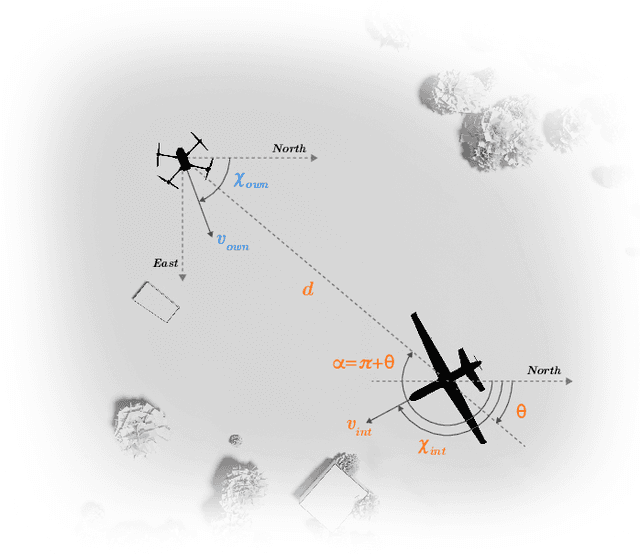
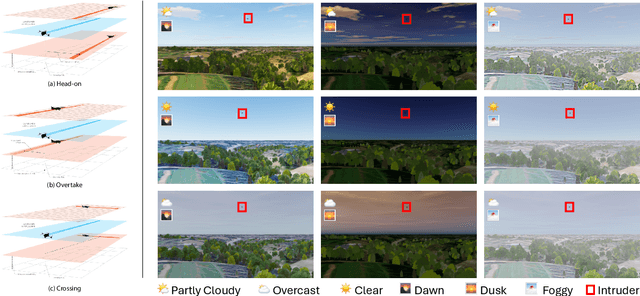
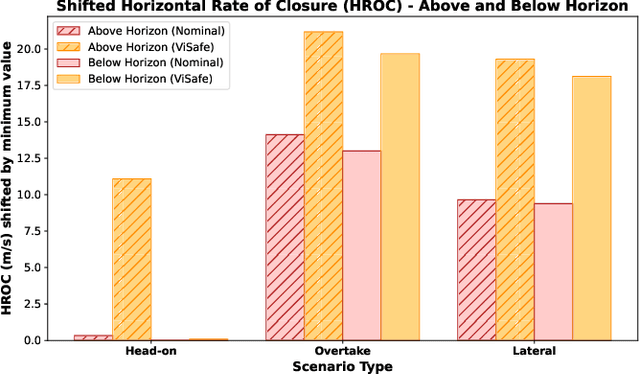
Assured safe-separation is essential for achieving seamless high-density operation of airborne vehicles in a shared airspace. To equip resource-constrained aerial systems with this safety-critical capability, we present ViSafe, a high-speed vision-only airborne collision avoidance system. ViSafe offers a full-stack solution to the Detect and Avoid (DAA) problem by tightly integrating a learning-based edge-AI framework with a custom multi-camera hardware prototype designed under SWaP-C constraints. By leveraging perceptual input-focused control barrier functions (CBF) to design, encode, and enforce safety thresholds, ViSafe can provide provably safe runtime guarantees for self-separation in high-speed aerial operations. We evaluate ViSafe's performance through an extensive test campaign involving both simulated digital twins and real-world flight scenarios. By independently varying agent types, closure rates, interaction geometries, and environmental conditions (e.g., weather and lighting), we demonstrate that ViSafe consistently ensures self-separation across diverse scenarios. In first-of-its-kind real-world high-speed collision avoidance tests with closure rates reaching 144 km/h, ViSafe sets a new benchmark for vision-only autonomous collision avoidance, establishing a new standard for safety in high-speed aerial navigation.
TartanAviation: Image, Speech, and ADS-B Trajectory Datasets for Terminal Airspace Operations
Mar 05, 2024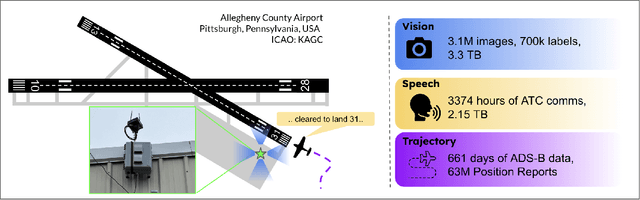
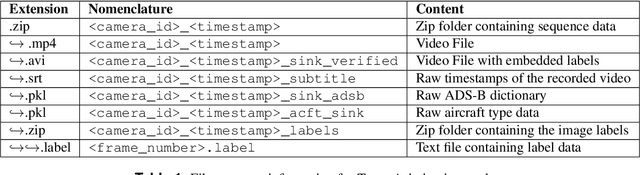
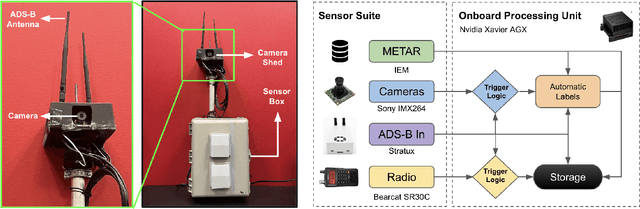
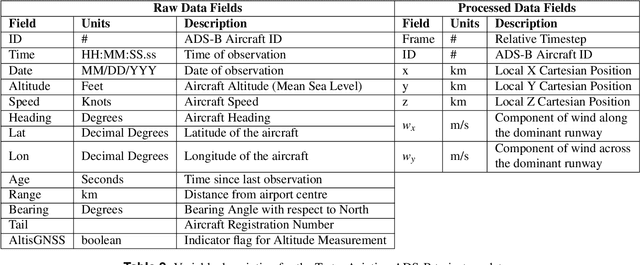
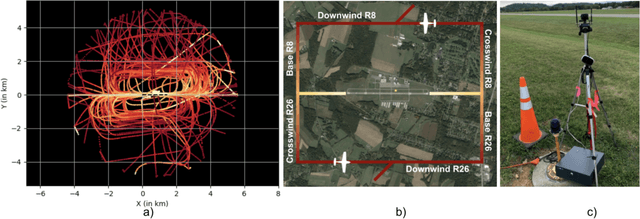
We introduce TartanAviation, an open-source multi-modal dataset focused on terminal-area airspace operations. TartanAviation provides a holistic view of the airport environment by concurrently collecting image, speech, and ADS-B trajectory data using setups installed inside airport boundaries. The datasets were collected at both towered and non-towered airfields across multiple months to capture diversity in aircraft operations, seasons, aircraft types, and weather conditions. In total, TartanAviation provides 3.1M images, 3374 hours of Air Traffic Control speech data, and 661 days of ADS-B trajectory data. The data was filtered, processed, and validated to create a curated dataset. In addition to the dataset, we also open-source the code-base used to collect and pre-process the dataset, further enhancing accessibility and usability. We believe this dataset has many potential use cases and would be particularly vital in allowing AI and machine learning technologies to be integrated into air traffic control systems and advance the adoption of autonomous aircraft in the airspace.
FoundLoc: Vision-based Onboard Aerial Localization in the Wild
Oct 25, 2023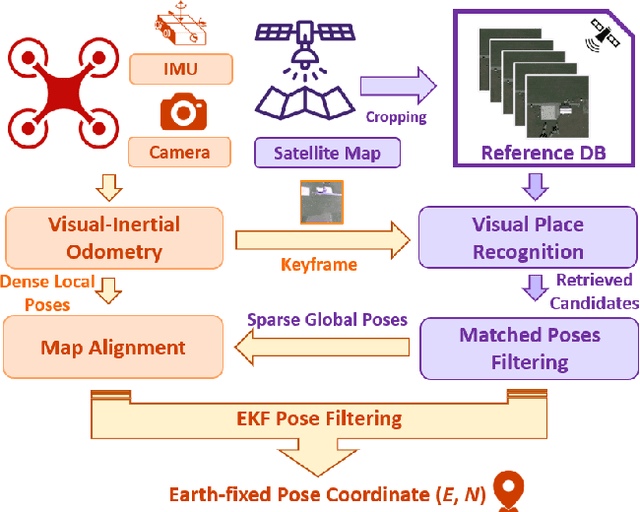
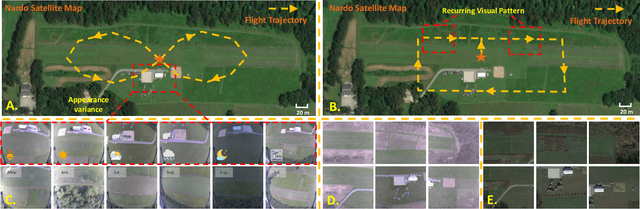
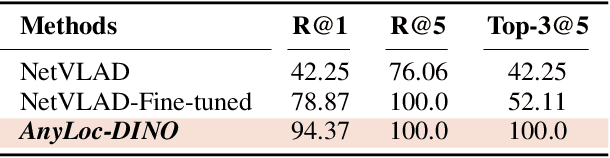
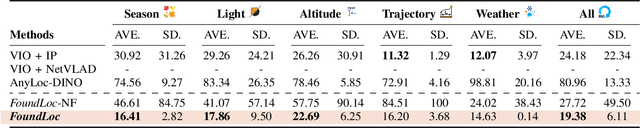
Robust and accurate localization for Unmanned Aerial Vehicles (UAVs) is an essential capability to achieve autonomous, long-range flights. Current methods either rely heavily on GNSS, face limitations in visual-based localization due to appearance variances and stylistic dissimilarities between camera and reference imagery, or operate under the assumption of a known initial pose. In this paper, we developed a GNSS-denied localization approach for UAVs that harnesses both Visual-Inertial Odometry (VIO) and Visual Place Recognition (VPR) using a foundation model. This paper presents a novel vision-based pipeline that works exclusively with a nadir-facing camera, an Inertial Measurement Unit (IMU), and pre-existing satellite imagery for robust, accurate localization in varied environments and conditions. Our system demonstrated average localization accuracy within a $20$-meter range, with a minimum error below $1$ meter, under real-world conditions marked by drastic changes in environmental appearance and with no assumption of the vehicle's initial pose. The method is proven to be effective and robust, addressing the crucial need for reliable UAV localization in GNSS-denied environments, while also being computationally efficient enough to be deployed on resource-constrained platforms.
SoRTS: Learned Tree Search for Long Horizon Social Robot Navigation
Sep 22, 2023



The fast-growing demand for fully autonomous robots in shared spaces calls for the development of trustworthy agents that can safely and seamlessly navigate in crowded environments. Recent models for motion prediction show promise in characterizing social interactions in such environments. Still, adapting them for navigation is challenging as they often suffer from generalization failures. Prompted by this, we propose Social Robot Tree Search (SoRTS), an algorithm for safe robot navigation in social domains. SoRTS aims to augment existing socially aware motion prediction models for long-horizon navigation using Monte Carlo Tree Search. We use social navigation in general aviation as a case study to evaluate our approach and further the research in full-scale aerial autonomy. In doing so, we introduce XPlaneROS, a high-fidelity aerial simulator that enables human-robot interaction. We use XPlaneROS to conduct a first-of-its-kind user study where 26 FAA-certified pilots interact with a human pilot, our algorithm, and its ablation. Our results, supported by statistical evidence, show that SoRTS exhibits a comparable performance to competent human pilots, significantly outperforming its ablation. Finally, we complement these results with a broad set of self-play experiments to showcase our algorithm's performance in scenarios with increasing complexity.
SubT-MRS: A Subterranean, Multi-Robot, Multi-Spectral and Multi-Degraded Dataset for Robust SLAM
Aug 02, 2023



In recent years, significant progress has been made in the field of simultaneous localization and mapping (SLAM) research. However, current state-of-the-art solutions still struggle with limited accuracy and robustness in real-world applications. One major reason is the lack of datasets that fully capture the conditions faced by robots in the wild. To address this problem, we present SubT-MRS, an extremely challenging real-world dataset designed to push the limits of SLAM and perception algorithms. SubT-MRS is a multi-modal, multi-robot dataset collected mainly from subterranean environments having multi-degraded conditions including structureless corridors, varying lighting conditions, and perceptual obscurants such as smoke and dust. Furthermore, the dataset packages information from a diverse range of time-synchronized sensors, including LiDAR, visual cameras, thermal cameras, and IMUs captured using varied vehicular motions like aerial, legged, and wheeled, to support research in sensor fusion, which is essential for achieving accurate and robust robotic perception in complex environments. To evaluate the accuracy of SLAM systems, we also provide a dense 3D model with sub-centimeter-level accuracy, as well as accurate 6DoF ground truth. Our benchmarking approach includes several state-of-the-art methods to demonstrate the challenges our datasets introduce, particularly in the case of multi-degraded environments.
Learned Tree Search for Long-Horizon Social Robot Navigation in Shared Airspace
Apr 04, 2023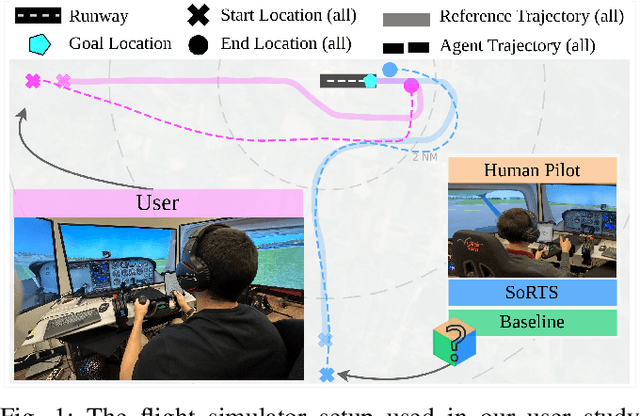
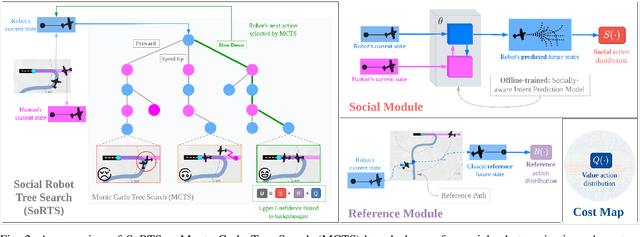
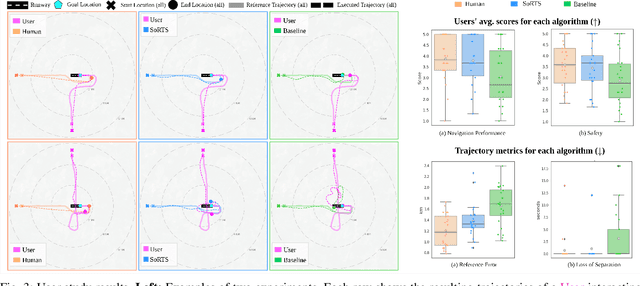
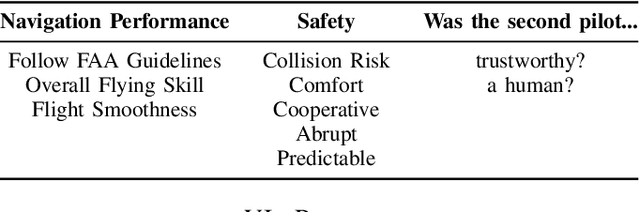
The fast-growing demand for fully autonomous aerial operations in shared spaces necessitates developing trustworthy agents that can safely and seamlessly navigate in crowded, dynamic spaces. In this work, we propose Social Robot Tree Search (SoRTS), an algorithm for the safe navigation of mobile robots in social domains. SoRTS aims to augment existing socially-aware trajectory prediction policies with a Monte Carlo Tree Search planner for improved downstream navigation of mobile robots. To evaluate the performance of our method, we choose the use case of social navigation for general aviation. To aid this evaluation, within this work, we also introduce X-PlaneROS, a high-fidelity aerial simulator, to enable more research in full-scale aerial autonomy. By conducting a user study based on the assessments of 26 FAA certified pilots, we show that SoRTS performs comparably to a competent human pilot, significantly outperforming our baseline algorithm. We further complement these results with self-play experiments in scenarios with increasing complexity.
Challenges in Close-Proximity Safe and Seamless Operation of Manned and Unmanned Aircraft in Shared Airspace
Nov 13, 2022


We propose developing an integrated system to keep autonomous unmanned aircraft safely separated and behave as expected in conjunction with manned traffic. The main goal is to achieve safe manned-unmanned vehicle teaming to improve system performance, have each (robot/human) teammate learn from each other in various aircraft operations, and reduce the manning needs of manned aircraft. The proposed system anticipates and reacts to other aircraft using natural language instructions and can serve as a co-pilot or operate entirely autonomously. We point out the main technical challenges where improvements on current state-of-the-art are needed to enable Visual Flight Rules to fully autonomous aerial operations, bringing insights to these critical areas. Furthermore, we present an interactive demonstration in a prototypical scenario with one AI pilot and one human pilot sharing the same terminal airspace, interacting with each other using language, and landing safely on the same runway. We also show a demonstration of a vision-only aircraft detection system.