 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnmasking Reasoning Processes: A Process-aware Benchmark for Evaluating Structural Mathematical Reasoning in LLMs
Jan 31, 2026Recent large language models (LLMs) achieve near-saturation accuracy on many established mathematical reasoning benchmarks, raising concerns about their ability to diagnose genuine reasoning competence. This saturation largely stems from the dominance of template-based computation and shallow arithmetic decomposition in existing datasets, which underrepresent reasoning skills such as multi-constraint coordination, constructive logical synthesis, and spatial inference. To address this gap, we introduce ReasoningMath-Plus, a benchmark of 150 carefully curated problems explicitly designed to evaluate structural reasoning. Each problem emphasizes reasoning under interacting constraints, constructive solution formation, or non-trivial structural insight, and is annotated with a minimal reasoning skeleton to support fine-grained process-level evaluation. Alongside the dataset, we introduce HCRS (Hazard-aware Chain-based Rule Score), a deterministic step-level scoring function, and train a Process Reward Model (PRM) on the annotated reasoning traces. Empirically, while leading models attain relatively high final-answer accuracy (up to 5.8/10), HCRS-based holistic evaluation yields substantially lower scores (average 4.36/10, best 5.14/10), showing that answer-only metrics can overestimate reasoning robustness.
Challenging the Boundaries of Reasoning: An Olympiad-Level Math Benchmark for Large Language Models
Mar 27, 2025



In recent years, the rapid development of large reasoning models has resulted in the saturation of existing benchmarks for evaluating mathematical reasoning, highlighting the urgent need for more challenging and rigorous evaluation frameworks. To address this gap, we introduce OlymMATH, a novel Olympiad-level mathematical benchmark, designed to rigorously test the complex reasoning capabilities of LLMs. OlymMATH features 200 meticulously curated problems, each manually verified and available in parallel English and Chinese versions. The problems are systematically organized into two distinct difficulty tiers: (1) AIME-level problems (easy) that establish a baseline for mathematical reasoning assessment, and (2) significantly more challenging problems (hard) designed to push the boundaries of current state-of-the-art models. In our benchmark, these problems span four core mathematical fields, each including a verifiable numerical solution to enable objective, rule-based evaluation. Empirical results underscore the significant challenge presented by OlymMATH, with state-of-the-art models including DeepSeek-R1 and OpenAI's o3-mini demonstrating notably limited accuracy on the hard subset. Furthermore, the benchmark facilitates comprehensive bilingual assessment of mathematical reasoning abilities-a critical dimension that remains largely unaddressed in mainstream mathematical reasoning benchmarks. We release the OlymMATH benchmark at the STILL project: https://github.com/RUCAIBox/Slow_Thinking_with_LLMs.
Technical Report: Enhancing LLM Reasoning with Reward-guided Tree Search
Nov 18, 2024



Recently, test-time scaling has garnered significant attention from the research community, largely due to the substantial advancements of the o1 model released by OpenAI. By allocating more computational resources during the inference phase, large language models~(LLMs) can extensively explore the solution space by generating more thought tokens or diverse solutions, thereby producing more accurate responses. However, developing an o1-like reasoning approach is challenging, and researchers have been making various attempts to advance this open area of research. In this paper, we present a preliminary exploration into enhancing the reasoning abilities of LLMs through reward-guided tree search algorithms. This framework is implemented by integrating the policy model, reward model, and search algorithm. It is primarily constructed around a tree search algorithm, where the policy model navigates a dynamically expanding tree guided by a specially trained reward model. We thoroughly explore various design considerations necessary for implementing this framework and provide a detailed report of the technical aspects. To assess the effectiveness of our approach, we focus on mathematical reasoning tasks and conduct extensive evaluations on four challenging datasets, significantly enhancing the reasoning abilities of LLMs.
$p$SVM: Soft-margin SVMs with $p$-norm Hinge Loss
Aug 20, 2024Support Vector Machines (SVMs) based on hinge loss have been extensively discussed and applied to various binary classification tasks. These SVMs achieve a balance between margin maximization and the minimization of slack due to outliers. Although many efforts have been dedicated to enhancing the performance of SVMs with hinge loss, studies on $p$SVMs, soft-margin SVMs with $p$-norm hinge loss, remain relatively scarce. In this paper, we explore the properties, performance, and training algorithms of $p$SVMs. We first derive the generalization bound of $p$SVMs, then formulate the dual optimization problem, comparing it with the traditional approach. Furthermore, we discuss a generalized version of the Sequential Minimal Optimization (SMO) algorithm, $p$SMO, to train our $p$SVM model. Comparative experiments on various datasets, including binary and multi-class classification tasks, demonstrate the effectiveness and advantages of our $p$SVM model and the $p$SMO method. Code is available at https://github.com/CoderBak/pSVM.
LLMBox: A Comprehensive Library for Large Language Models
Jul 08, 2024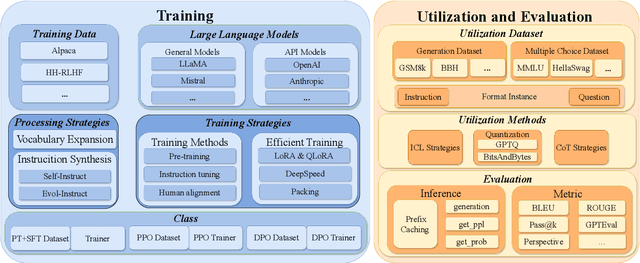
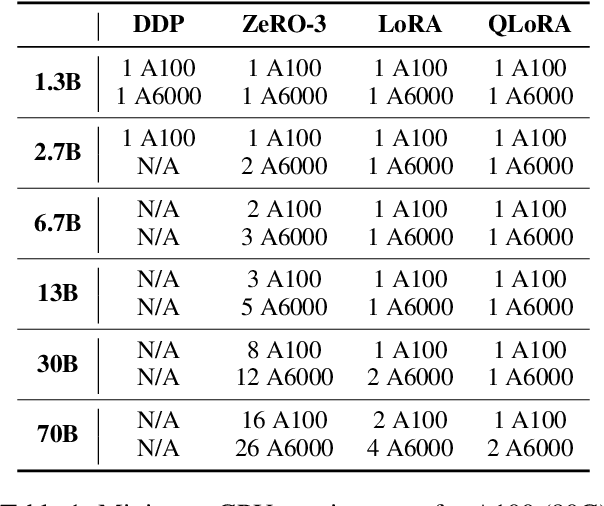
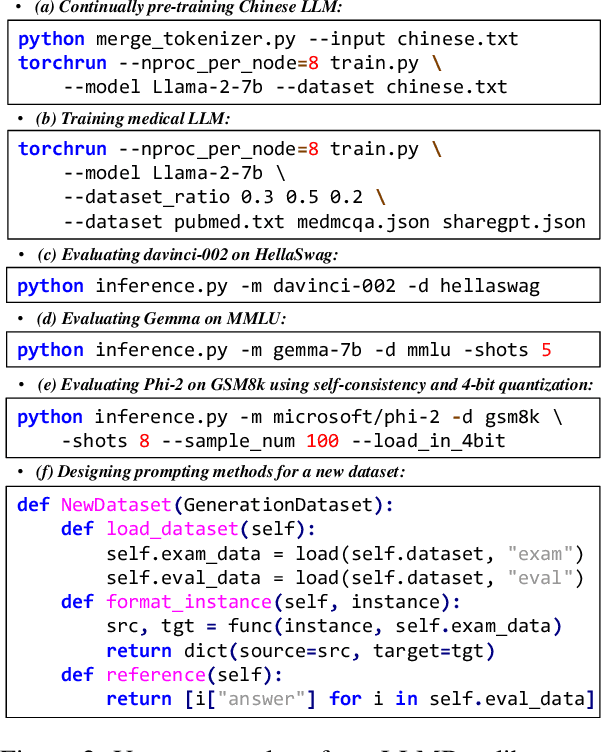

To facilitate the research on large language models (LLMs), this paper presents a comprehensive and unified library, LLMBox, to ease the development, use, and evaluation of LLMs. This library is featured with three main merits: (1) a unified data interface that supports the flexible implementation of various training strategies, (2) a comprehensive evaluation that covers extensive tasks, datasets, and models, and (3) more practical consideration, especially on user-friendliness and efficiency. With our library, users can easily reproduce existing methods, train new models, and conduct comprehensive performance comparisons. To rigorously test LLMBox, we conduct extensive experiments in a diverse coverage of evaluation settings, and experimental results demonstrate the effectiveness and efficiency of our library in supporting various implementations related to LLMs. The detailed introduction and usage guidance can be found at https://github.com/RUCAIBox/LLMBox.
SubT-MRS: A Subterranean, Multi-Robot, Multi-Spectral and Multi-Degraded Dataset for Robust SLAM
Aug 02, 2023



In recent years, significant progress has been made in the field of simultaneous localization and mapping (SLAM) research. However, current state-of-the-art solutions still struggle with limited accuracy and robustness in real-world applications. One major reason is the lack of datasets that fully capture the conditions faced by robots in the wild. To address this problem, we present SubT-MRS, an extremely challenging real-world dataset designed to push the limits of SLAM and perception algorithms. SubT-MRS is a multi-modal, multi-robot dataset collected mainly from subterranean environments having multi-degraded conditions including structureless corridors, varying lighting conditions, and perceptual obscurants such as smoke and dust. Furthermore, the dataset packages information from a diverse range of time-synchronized sensors, including LiDAR, visual cameras, thermal cameras, and IMUs captured using varied vehicular motions like aerial, legged, and wheeled, to support research in sensor fusion, which is essential for achieving accurate and robust robotic perception in complex environments. To evaluate the accuracy of SLAM systems, we also provide a dense 3D model with sub-centimeter-level accuracy, as well as accurate 6DoF ground truth. Our benchmarking approach includes several state-of-the-art methods to demonstrate the challenges our datasets introduce, particularly in the case of multi-degraded environments.