 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSubT-MRS: A Subterranean, Multi-Robot, Multi-Spectral and Multi-Degraded Dataset for Robust SLAM
Aug 02, 2023



In recent years, significant progress has been made in the field of simultaneous localization and mapping (SLAM) research. However, current state-of-the-art solutions still struggle with limited accuracy and robustness in real-world applications. One major reason is the lack of datasets that fully capture the conditions faced by robots in the wild. To address this problem, we present SubT-MRS, an extremely challenging real-world dataset designed to push the limits of SLAM and perception algorithms. SubT-MRS is a multi-modal, multi-robot dataset collected mainly from subterranean environments having multi-degraded conditions including structureless corridors, varying lighting conditions, and perceptual obscurants such as smoke and dust. Furthermore, the dataset packages information from a diverse range of time-synchronized sensors, including LiDAR, visual cameras, thermal cameras, and IMUs captured using varied vehicular motions like aerial, legged, and wheeled, to support research in sensor fusion, which is essential for achieving accurate and robust robotic perception in complex environments. To evaluate the accuracy of SLAM systems, we also provide a dense 3D model with sub-centimeter-level accuracy, as well as accurate 6DoF ground truth. Our benchmarking approach includes several state-of-the-art methods to demonstrate the challenges our datasets introduce, particularly in the case of multi-degraded environments.
Present and Future of SLAM in Extreme Underground Environments
Aug 02, 2022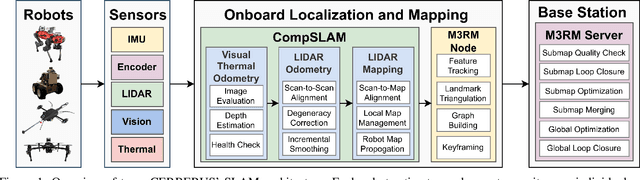
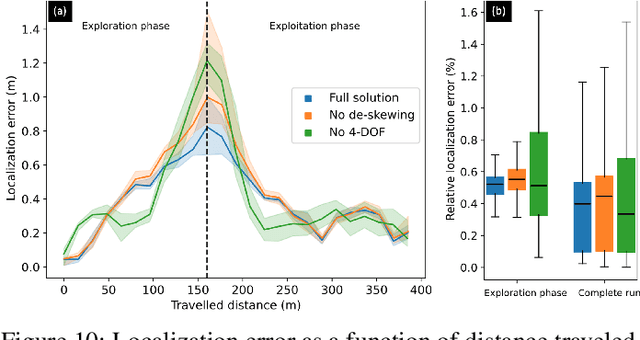
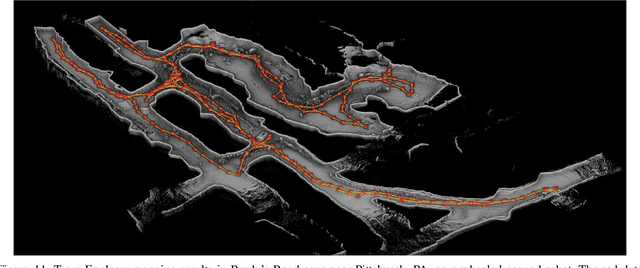
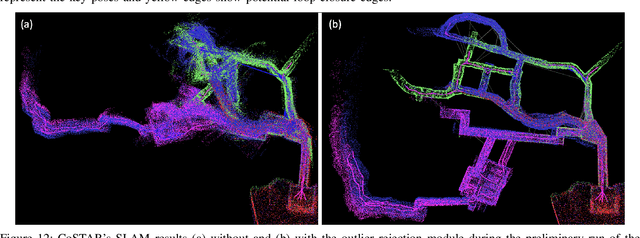
This paper reports on the state of the art in underground SLAM by discussing different SLAM strategies and results across six teams that participated in the three-year-long SubT competition. In particular, the paper has four main goals. First, we review the algorithms, architectures, and systems adopted by the teams; particular emphasis is put on lidar-centric SLAM solutions (the go-to approach for virtually all teams in the competition), heterogeneous multi-robot operation (including both aerial and ground robots), and real-world underground operation (from the presence of obscurants to the need to handle tight computational constraints). We do not shy away from discussing the dirty details behind the different SubT SLAM systems, which are often omitted from technical papers. Second, we discuss the maturity of the field by highlighting what is possible with the current SLAM systems and what we believe is within reach with some good systems engineering. Third, we outline what we believe are fundamental open problems, that are likely to require further research to break through. Finally, we provide a list of open-source SLAM implementations and datasets that have been produced during the SubT challenge and related efforts, and constitute a useful resource for researchers and practitioners.
Towards a Unified Approach to Homography Estimation Using Image Features and Pixel Intensities
Feb 20, 2022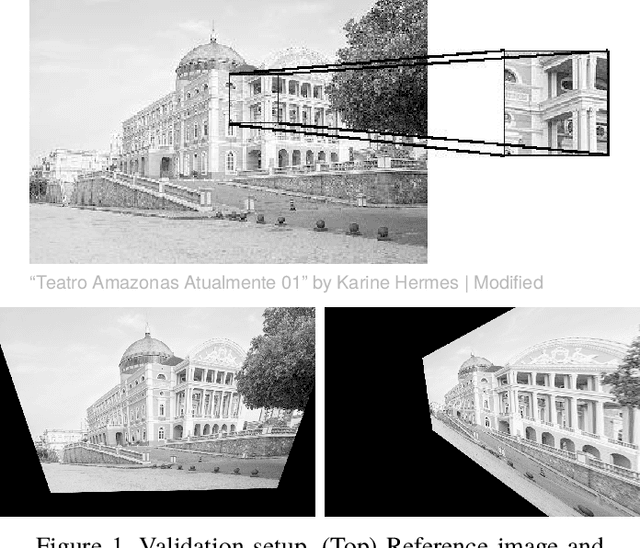
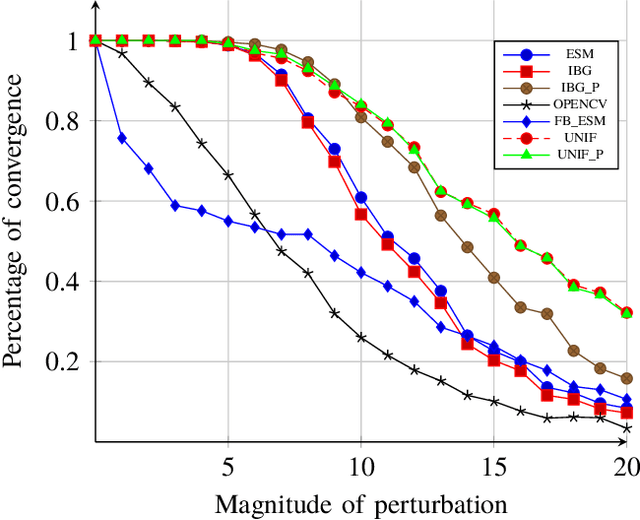
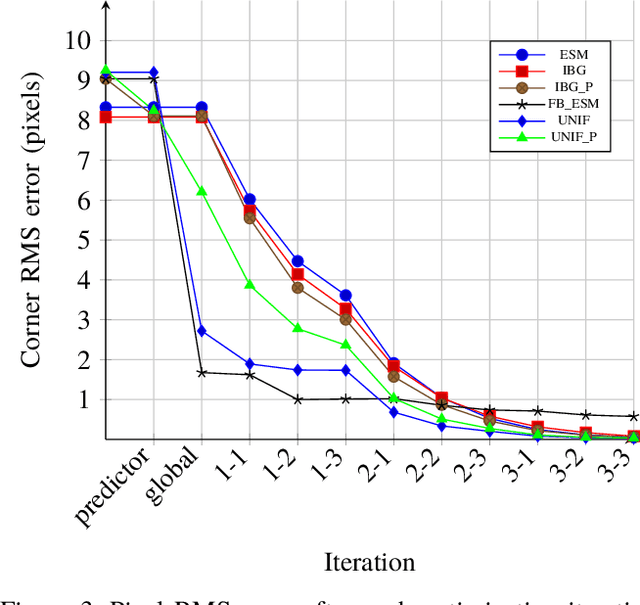
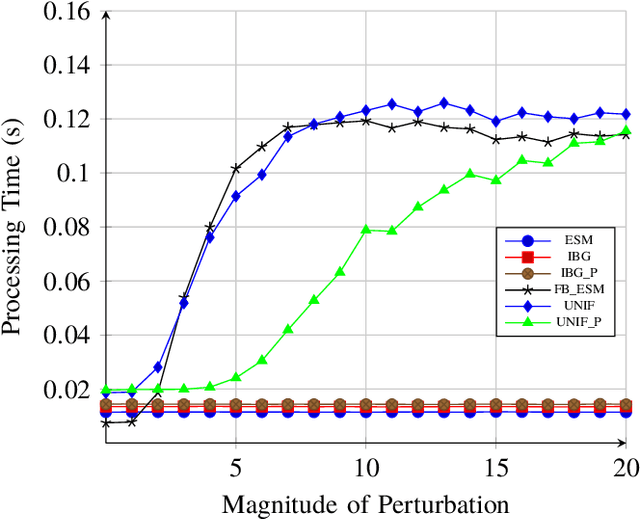
The homography matrix is a key component in various vision-based robotic tasks. Traditionally, homography estimation algorithms are classified into feature- or intensity-based. The main advantages of the latter are their versatility, accuracy, and robustness to arbitrary illumination changes. On the other hand, they have a smaller domain of convergence than the feature-based solutions. Their combination is hence promising, but existing techniques only apply them sequentially. This paper proposes a new hybrid method that unifies both classes into a single nonlinear optimization procedure, applies the same minimization method, and uses the same homography parametrization and warping function. Experimental validation using a classical testing framework shows that the proposed unified approach has improved convergence properties compared to each individual class. These are also demonstrated in a visual tracking application. As a final contribution, our ready-to-use implementation of the algorithm is made publicly available to the research community.
Super Odometry: IMU-centric LiDAR-Visual-Inertial Estimator for Challenging Environments
Apr 30, 2021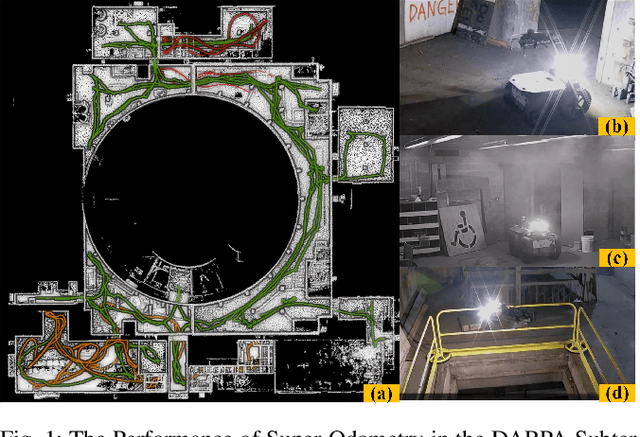
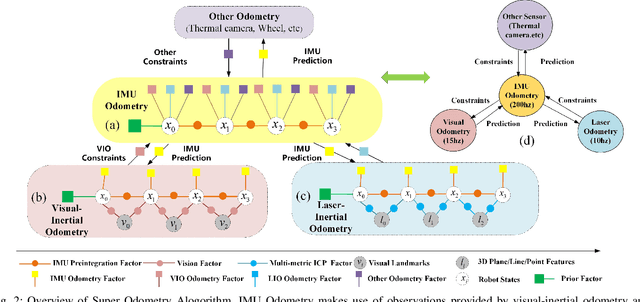
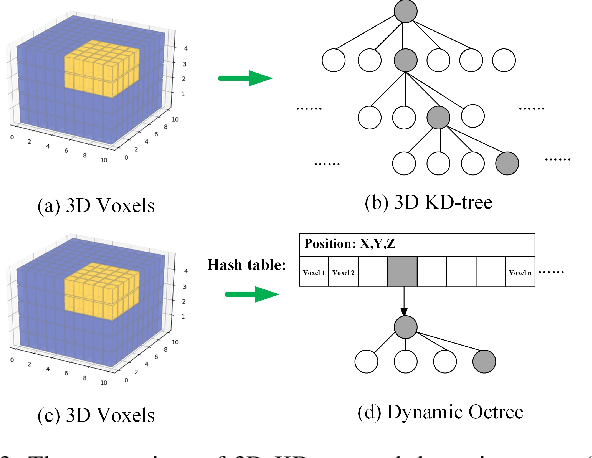
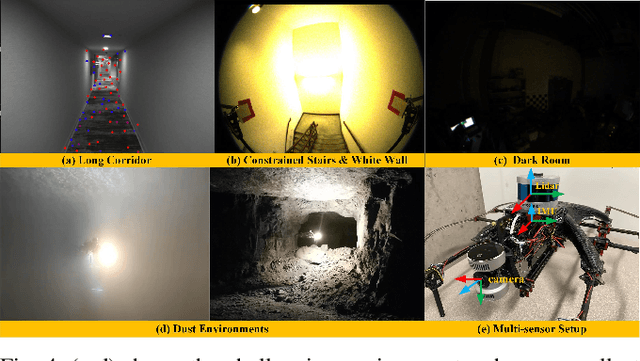
We propose Super Odometry, a high-precision multi-modal sensor fusion framework, providing a simple but effective way to fuse multiple sensors such as LiDAR, camera, and IMU sensors and achieve robust state estimation in perceptually-degraded environments. Different from traditional sensor-fusion methods, Super Odometry employs an IMU-centric data processing pipeline, which combines the advantages of loosely coupled methods with tightly coupled methods and recovers motion in a coarse-to-fine manner. The proposed framework is composed of three parts: IMU odometry, visual-inertial odometry, and laser-inertial odometry. The visual-inertial odometry and laser-inertial odometry provide the pose prior to constrain the IMU bias and receive the motion prediction from IMU odometry. To ensure high performance in real-time, we apply a dynamic octree that only consumes 10 % of the running time compared with a static KD-tree. The proposed system was deployed on drones and ground robots, as part of Team Explorer's effort to the DARPA Subterranean Challenge where the team won $1^{st}$ and $2^{nd}$ place in the Tunnel and Urban Circuits, respectively.