 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Unified Approach to Homography Estimation Using Image Features and Pixel Intensities
Feb 20, 2022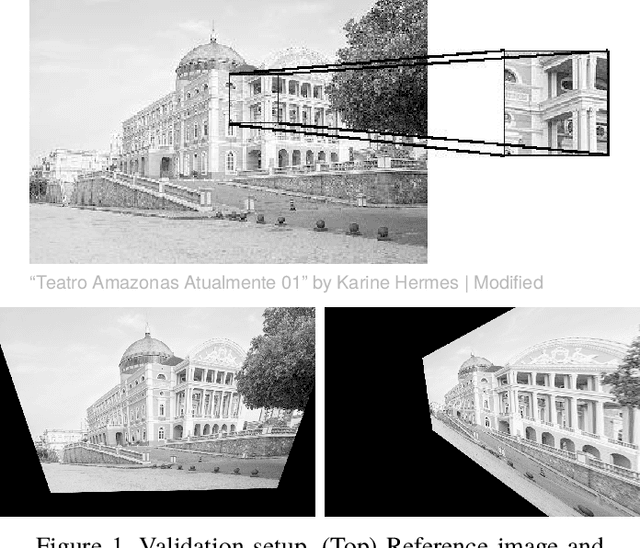
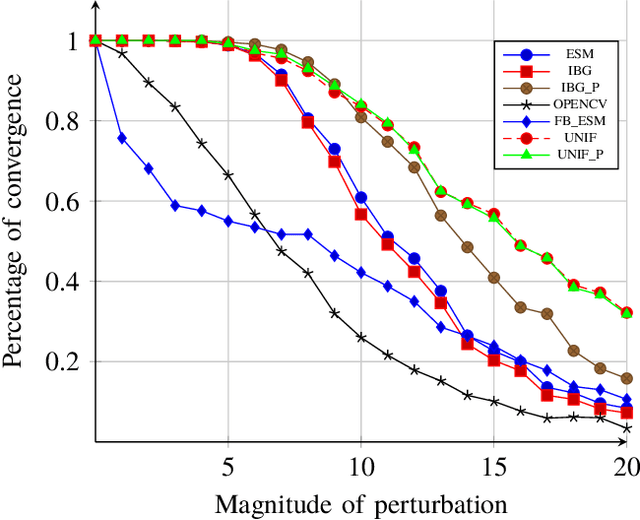
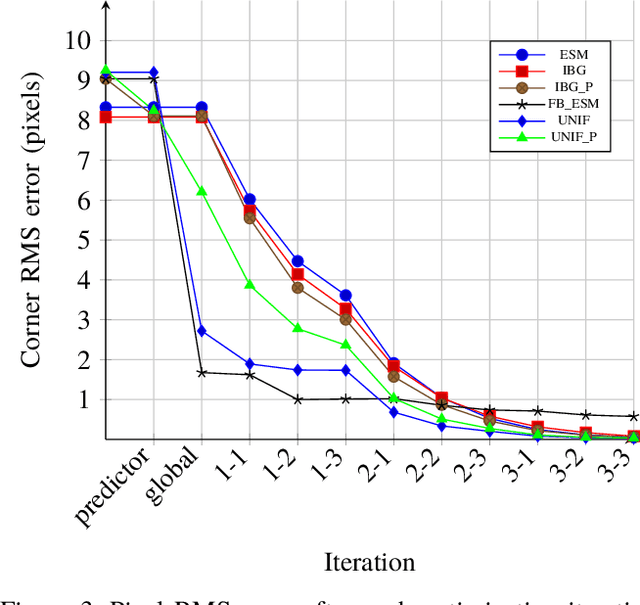
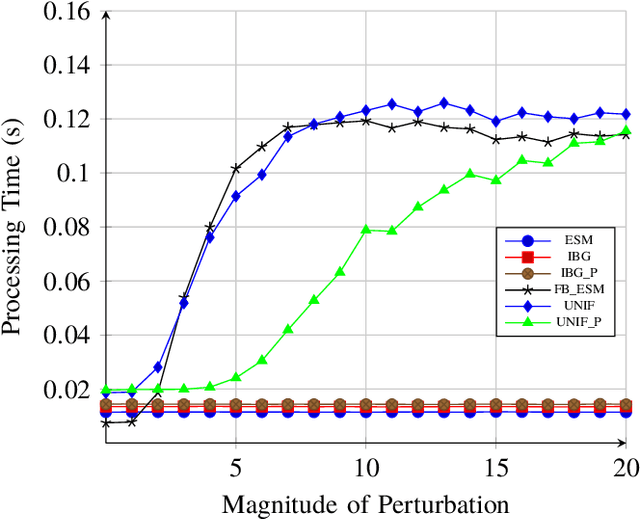
The homography matrix is a key component in various vision-based robotic tasks. Traditionally, homography estimation algorithms are classified into feature- or intensity-based. The main advantages of the latter are their versatility, accuracy, and robustness to arbitrary illumination changes. On the other hand, they have a smaller domain of convergence than the feature-based solutions. Their combination is hence promising, but existing techniques only apply them sequentially. This paper proposes a new hybrid method that unifies both classes into a single nonlinear optimization procedure, applies the same minimization method, and uses the same homography parametrization and warping function. Experimental validation using a classical testing framework shows that the proposed unified approach has improved convergence properties compared to each individual class. These are also demonstrated in a visual tracking application. As a final contribution, our ready-to-use implementation of the algorithm is made publicly available to the research community.
Estimation of Tire-Road Friction for Autonomous Vehicles: a Neural Network Approach
Aug 01, 2019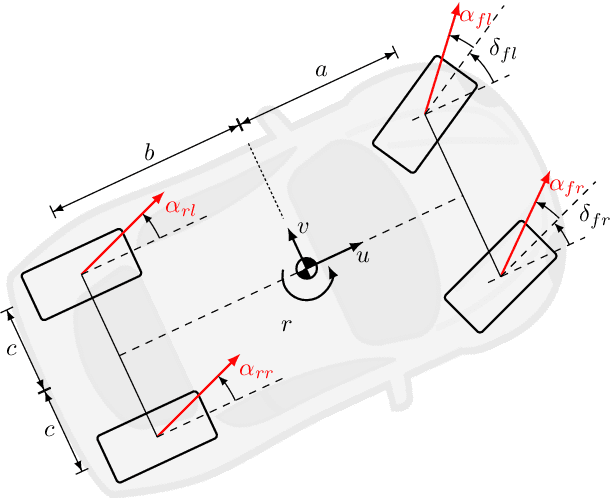
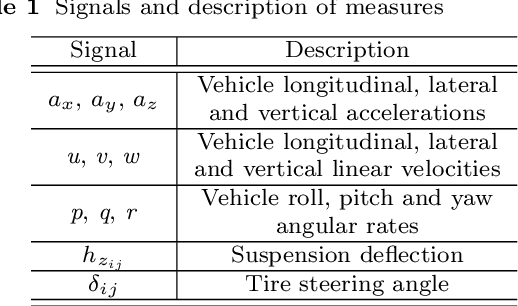
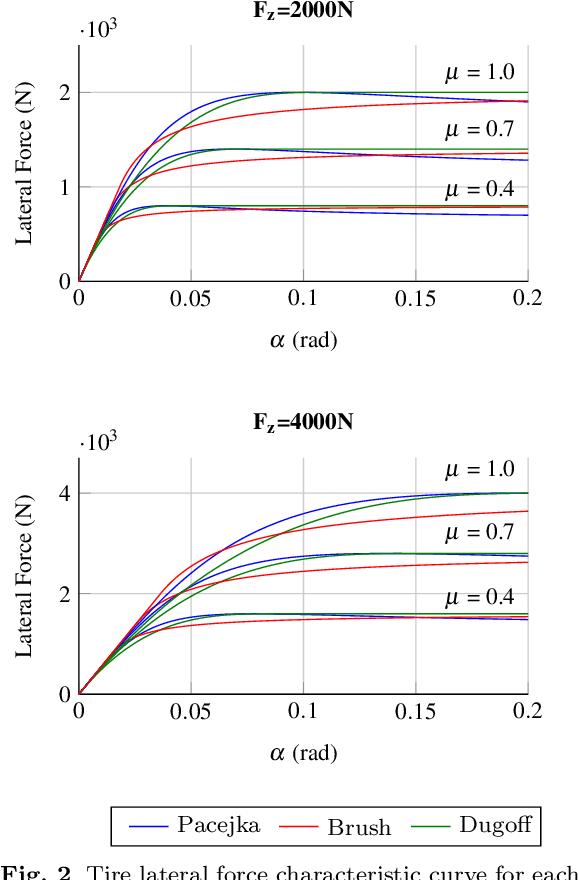

The performance of vehicle active safety systems is dependent on the friction force arising from the contact of tires and the road surface. Therefore, an adequate knowledge of the tire-road friction coefficient is of great importance to achieve a good performance of different vehicle control systems. This paper deals with the tire-road friction coefficient estimation problem through the knowledge of lateral tire force. A time delay neural network (TDNN) is adopted for the proposed estimation design. The TDNN aims at detecting road friction coefficient under lateral force excitations avoiding the use of standard mathematical tire models, which may provide more efficient methods and more robust results. Moreover, the approach is able to estimate the road friction at each wheel independently, instead of using lumped axle models simplifications. Simulations based on a realistic vehicle model are carried out on different road surfaces and driving maneuvers to verify the effectiveness of the proposed estimation method. The results are compared with a classical approach, a model-based method modeled as a nonlinear regression.