 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForestSim: A Synthetic Benchmark for Intelligent Vehicle Perception in Unstructured Forest Environments
Mar 30, 2026Robust scene understanding is essential for intelligent vehicles operating in natural, unstructured environments. While semantic segmentation datasets for structured urban driving are abundant, the datasets for extremely unstructured wild environments remain scarce due to the difficulty and cost of generating pixel-accurate annotations. These limitations hinder the development of perception systems needed for intelligent ground vehicles tasked with forestry automation, agricultural robotics, disaster response, and all-terrain mobility. To address this gap, we present ForestSim, a high-fidelity synthetic dataset designed for training and evaluating semantic segmentation models for intelligent vehicles in forested off-road and no-road environments. ForestSim contains 2094 photorealistic images across 25 diverse environments, covering multiple seasons, terrain types, and foliage densities. Using Unreal Engine environments integrated with Microsoft AirSim, we generate consistent, pixel-accurate labels across 20 classes relevant to autonomous navigation. We benchmark ForestSim using state-of-the-art architectures and report strong performance despite the inherent challenges of unstructured scenes. ForestSim provides a scalable and accessible foundation for perception research supporting the next generation of intelligent off-road vehicles. The dataset and code are publicly available: Dataset: https://vailforestsim.github.io Code: https://github.com/pragatwagle/ForestSim
Seeing Where to Deploy: Metric RGB-Based Traversability Analysis for Aerial-to-Ground Hidden Space Inspection
Mar 15, 2026Inspection of confined infrastructure such as culverts often requires accessing hidden spaces whose entrances are reachable primarily from elevated viewpoints. Aerial-ground cooperation enables a UAV to deploy a compact UGV for interior exploration, but selecting a suitable deployment region from aerial observations requires metric terrain reasoning involving scale ambiguity, reconstruction uncertainty, and terrain semantics. We present a metric RGB-based geometric-semantic reconstruction and traversability analysis framework for aerial-to-ground hidden space inspection. A feed-forward multi-view RGB reconstruction backbone produces dense geometry, while temporally consistent semantic segmentation yields a 3D semantic map. To enable deployment-relevant measurements without LiDAR-based dense mapping, we introduce an embodied motion prior that recovers metric scale by enforcing consistency between predicted camera motion and onboard platform egomotion. From the metrically grounded reconstruction, we construct a confidence-aware geometric-semantic traversability map and evaluate candidate deployment zones under explicit reachability constraints. Experiments on a tethered UAV-UGV platform demonstrate reliable deployment-zone identification in hidden space scenarios.
LPV-MPC for Lateral Control in Full-Scale Autonomous Racing
Mar 14, 2026Autonomous racing has attracted significant attention recently, presenting challenges in selecting an optimal controller that operates within the onboard system's computational limits and meets operational constraints such as limited track time and high costs. This paper introduces a Linear Parameter-Varying Model Predictive Controller (LPV-MPC) for lateral control. Implemented on an IAC AV-24, the controller achieved stable performance at speeds exceeding 160 mph (71.5 m/s). We detail the controller design, the methodology for extracting model parameters, and key system-level and implementation considerations. Additionally, we report results from our final race run, providing a comprehensive analysis of both vehicle dynamics and controller performance. A Python implementation of the framework is available at: https://tinyurl.com/LPV-MPC-acados
MiniUGV$_2$: A Compact UAV-Deployable Tracked Ground Vehicle with Manipulation Capabilities
Mar 01, 2026Exploring and inspecting \emph{Hidden Spaces}, defined as environments whose entrances are accessible only to aerial robots but remain unexplored due to geometric constraints, limited flight time, and communication loss, remains a major challenge. We present miniUGV$_2$, a compact UAV-deployable tracked ground vehicle that extends UAV capabilities into confined environments. The system introduces dual articulated arms, integrated LiDAR and depth sensing, and modular electronics for enhanced autonomy. A novel tether module with an electro-permanent magnetic head enables safe deployment, retrieval, and optional detachment, thereby overcoming prior entanglement issues. Experiments demonstrate robust terrain navigation, self-righting, and manipulation of objects up to 3.5 kg, validating miniUGV$_2$ as a versatile platform for hybrid aerial-ground robotics.
Navigating the Wild: Pareto-Optimal Visual Decision-Making in Image Space
Nov 11, 2025Navigating complex real-world environments requires semantic understanding and adaptive decision-making. Traditional reactive methods without maps often fail in cluttered settings, map-based approaches demand heavy mapping effort, and learning-based solutions rely on large datasets with limited generalization. To address these challenges, we present Pareto-Optimal Visual Navigation, a lightweight image-space framework that combines data-driven semantics, Pareto-optimal decision-making, and visual servoing for real-time navigation.
AFRDA: Attentive Feature Refinement for Domain Adaptive Semantic Segmentation
Jul 23, 2025In Unsupervised Domain Adaptive Semantic Segmentation (UDA-SS), a model is trained on labeled source domain data (e.g., synthetic images) and adapted to an unlabeled target domain (e.g., real-world images) without access to target annotations. Existing UDA-SS methods often struggle to balance fine-grained local details with global contextual information, leading to segmentation errors in complex regions. To address this, we introduce the Adaptive Feature Refinement (AFR) module, which enhances segmentation accuracy by refining highresolution features using semantic priors from low-resolution logits. AFR also integrates high-frequency components, which capture fine-grained structures and provide crucial boundary information, improving object delineation. Additionally, AFR adaptively balances local and global information through uncertaintydriven attention, reducing misclassifications. Its lightweight design allows seamless integration into HRDA-based UDA methods, leading to state-of-the-art segmentation performance. Our approach improves existing UDA-SS methods by 1.05% mIoU on GTA V --> Cityscapes and 1.04% mIoU on Synthia-->Cityscapes. The implementation of our framework is available at: https://github.com/Masrur02/AFRDA
Situationally-Aware Dynamics Learning
May 26, 2025



Autonomous robots operating in complex, unstructured environments face significant challenges due to latent, unobserved factors that obscure their understanding of both their internal state and the external world. Addressing this challenge would enable robots to develop a more profound grasp of their operational context. To tackle this, we propose a novel framework for online learning of hidden state representations, with which the robots can adapt in real-time to uncertain and dynamic conditions that would otherwise be ambiguous and result in suboptimal or erroneous behaviors. Our approach is formalized as a Generalized Hidden Parameter Markov Decision Process, which explicitly models the influence of unobserved parameters on both transition dynamics and reward structures. Our core innovation lies in learning online the joint distribution of state transitions, which serves as an expressive representation of latent ego- and environmental-factors. This probabilistic approach supports the identification and adaptation to different operational situations, improving robustness and safety. Through a multivariate extension of Bayesian Online Changepoint Detection, our method segments changes in the underlying data generating process governing the robot's dynamics. The robot's transition model is then informed with a symbolic representation of the current situation derived from the joint distribution of latest state transitions, enabling adaptive and context-aware decision-making. To showcase the real-world effectiveness, we validate our approach in the challenging task of unstructured terrain navigation, where unmodeled and unmeasured terrain characteristics can significantly impact the robot's motion. Extensive experiments in both simulation and real world reveal significant improvements in data efficiency, policy performance, and the emergence of safer, adaptive navigation strategies.
Action Flow Matching for Continual Robot Learning
Apr 25, 2025



Continual learning in robotics seeks systems that can constantly adapt to changing environments and tasks, mirroring human adaptability. A key challenge is refining dynamics models, essential for planning and control, while addressing issues such as safe adaptation, catastrophic forgetting, outlier management, data efficiency, and balancing exploration with exploitation -- all within task and onboard resource constraints. Towards this goal, we introduce a generative framework leveraging flow matching for online robot dynamics model alignment. Rather than executing actions based on a misaligned model, our approach refines planned actions to better match with those the robot would take if its model was well aligned. We find that by transforming the actions themselves rather than exploring with a misaligned model -- as is traditionally done -- the robot collects informative data more efficiently, thereby accelerating learning. Moreover, we validate that the method can handle an evolving and possibly imperfect model while reducing, if desired, the dependency on replay buffers or legacy model snapshots. We validate our approach using two platforms: an unmanned ground vehicle and a quadrotor. The results highlight the method's adaptability and efficiency, with a record 34.2\% higher task success rate, demonstrating its potential towards enabling continual robot learning. Code: https://github.com/AlejandroMllo/action_flow_matching.
Neural Fidelity Calibration for Informative Sim-to-Real Adaptation
Apr 11, 2025Deep reinforcement learning can seamlessly transfer agile locomotion and navigation skills from the simulator to real world. However, bridging the sim-to-real gap with domain randomization or adversarial methods often demands expert physics knowledge to ensure policy robustness. Even so, cutting-edge simulators may fall short of capturing every real-world detail, and the reconstructed environment may introduce errors due to various perception uncertainties. To address these challenges, we propose Neural Fidelity Calibration (NFC), a novel framework that employs conditional score-based diffusion models to calibrate simulator physical coefficients and residual fidelity domains online during robot execution. Specifically, the residual fidelity reflects the simulation model shift relative to the real-world dynamics and captures the uncertainty of the perceived environment, enabling us to sample realistic environments under the inferred distribution for policy fine-tuning. Our framework is informative and adaptive in three key ways: (a) we fine-tune the pretrained policy only under anomalous scenarios, (b) we build sequential NFC online with the pretrained NFC's proposal prior, reducing the diffusion model's training burden, and (c) when NFC uncertainty is high and may degrade policy improvement, we leverage optimistic exploration to enable hallucinated policy optimization. Our framework achieves superior simulator calibration precision compared to state-of-the-art methods across diverse robots with high-dimensional parametric spaces. We study the critical contribution of residual fidelity to policy improvement in simulation and real-world experiments. Notably, our approach demonstrates robust robot navigation under challenging real-world conditions, such as a broken wheel axle on snowy surfaces.
Chance-Constrained Sampling-Based MPC for Collision Avoidance in Uncertain Dynamic Environments
Jan 15, 2025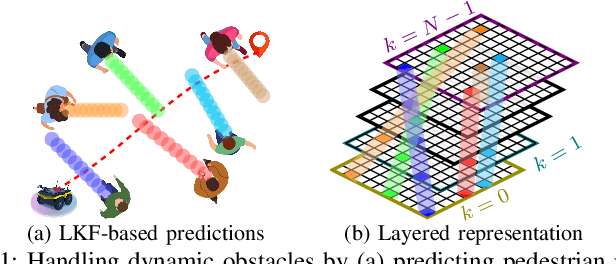
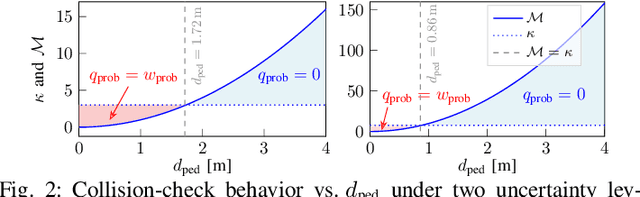


Navigating safely in dynamic and uncertain environments is challenging due to uncertainties in perception and motion. This letter presents C2U-MPPI, a robust sampling-based Model Predictive Control (MPC) framework that addresses these challenges by leveraging the Unscented Model Predictive Path Integral (U-MPPI) control strategy with integrated probabilistic chance constraints, ensuring more reliable and efficient navigation under uncertainty. Unlike gradient-based MPC methods, our approach (i) avoids linearization of system dynamics and directly applies non-convex and nonlinear chance constraints, enabling more accurate and flexible optimization, and (ii) enhances computational efficiency by reformulating probabilistic constraints into a deterministic form and employing a layered dynamic obstacle representation, enabling real-time handling of multiple obstacles. Extensive experiments in simulated and real-world human-shared environments validate the effectiveness of our algorithm against baseline methods, showcasing its capability to generate feasible trajectories and control inputs that adhere to system dynamics and constraints in dynamic settings, enabled by unscented-based sampling strategy and risk-sensitive trajectory evaluation. A supplementary video is available at: https://youtu.be/FptAhvJlQm8