 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Process-based Traversability Analysis for Terrain Mapless Navigation
Mar 27, 2024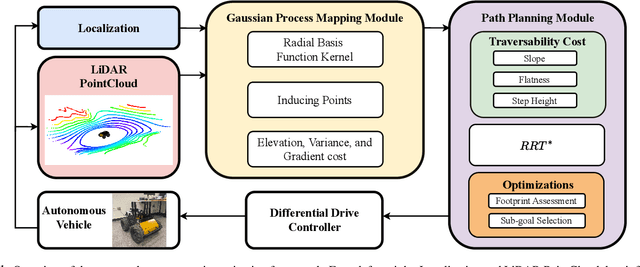
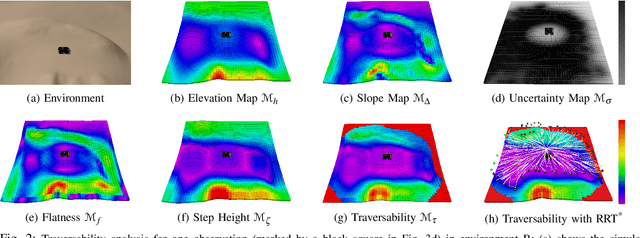
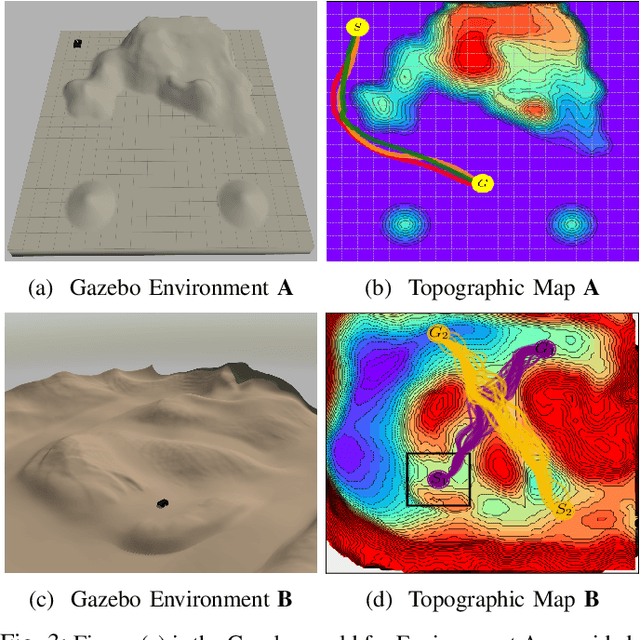
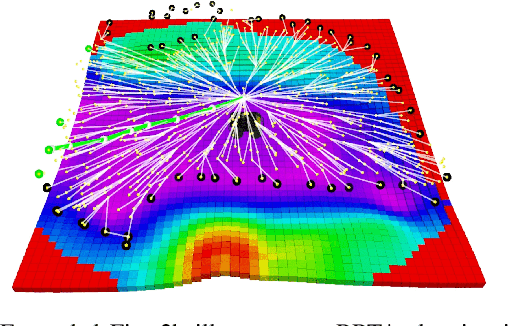
Efficient navigation through uneven terrain remains a challenging endeavor for autonomous robots. We propose a new geometric-based uneven terrain mapless navigation framework combining a Sparse Gaussian Process (SGP) local map with a Rapidly-Exploring Random Tree* (RRT*) planner. Our approach begins with the generation of a high-resolution SGP local map, providing an interpolated representation of the robot's immediate environment. This map captures crucial environmental variations, including height, uncertainties, and slope characteristics. Subsequently, we construct a traversability map based on the SGP representation to guide our planning process. The RRT* planner efficiently generates real-time navigation paths, avoiding untraversable terrain in pursuit of the goal. This combination of SGP-based terrain interpretation and RRT* planning enables ground robots to safely navigate environments with varying elevations and steep obstacles. We evaluate the performance of our proposed approach through robust simulation testing, highlighting its effectiveness in achieving safe and efficient navigation compared to existing methods.
Autonomous Mapless Navigation on Uneven Terrains
Feb 21, 2024We propose a new method for autonomous navigation in uneven terrains by utilizing a sparse Gaussian Process (SGP) based local perception model. The SGP local perception model is trained on local ranging observation (pointcloud) to learn the terrain elevation profile and extract the feasible navigation subgoals around the robot. Subsequently, a cost function, which prioritizes the safety of the robot in terms of keeping the robot's roll and pitch angles bounded within a specified range, is used to select a safety-aware subgoal that leads the robot to its final destination. The algorithm is designed to run in real-time and is intensively evaluated in simulation and real world experiments. The results compellingly demonstrate that our proposed algorithm consistently navigates uneven terrains with high efficiency and surpasses the performance of other planners. The code and video can be found here: https://rb.gy/3ov2r8