 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisasterLex: An Expert Concept-to-Schema Knowledge Graph for Geospatial Reasoning in Disaster Analytics
May 28, 2026Disasters are inevitable and increasingly costly, and effective response depends on querying structured tabular data: precise, information-dense records of hazard, exposure, vulnerability, and lifeline infrastructure that underpin disaster management. Current text-to-SQL methods enable natural-language access to such tables but transfer poorly to the disaster domain, where queries span heterogeneous geospatial schemas and require reasoning over causal relations. We introduce DisasterLex, a knowledge-graph-mediated framework that inserts an Expert Knowledge Graph (EKG) of curated concepts and typed causal edges between the user query and the database, bridged to schema by concept-to-table links. The orchestration runs four stages (identifying query entities, routing to the operational domain, planning over causal edges, and grounding the SQL), restricting the schema passed to the model at each step. We instantiate it on a disaster-analytics database (36 geospatial tables, 150 columns) with an EKG of 107 concepts, 117 causal edges, and 52 concept-to-schema links, evaluated on a 75-query test set. On all seven base models spanning proprietary and open-weight families, DisasterLex beats four state-of-the-art baselines (LightRAG, HippoRAG 2, ReFoRCE, CHESS) by 1.4x to 2.75x, with absolute scores of 1.65 to 3.56 (of 5.0). Error analysis shows baseline failures cluster in routing and multi-table SQL composition, the operations our orchestration explicitly addresses. Code, data, and the EKG artifact are available at https://github.com/YimingXiao98/DisasterLex and on Zenodo at https://doi.org/10.5281/zenodo.20388029.
DisasterBench: Benchmarking LLM Planning under Typed Tool Interface Constraints
May 27, 2026Disasters cause severe societal impacts, demanding rapid coordination of heterogeneous AI tools, from satellite analysis to flood prediction and damage assessment, into coherent multi-step workflows. As LLMs increasingly serve as orchestrators of such pipelines, effective coordination requires more than selecting semantically plausible tools: LLMs must generate executable workflows with correct parameter binding and dependency propagation. We introduce DisasterBench, a benchmark for evaluating structured multi-agent planning over semantically similar but operationally distinct disaster-response tools. To enable step-level failure attribution, we further propose First-Point-of-Failure (FPoF), which localizes the earliest root cause in a predicted workflow, separating primary errors from downstream cascading effects. Our evaluation reveals three findings: planning method effectiveness depends strongly on model capacity; tool mismatch and parameter-binding errors dominate first failures, revealing semantic grounding and execution consistency as distinct bottlenecks; and verbose intermediate reasoning can create instruction clash with structured output requirements, disrupting plan generation. Together, these findings highlight a fundamental gap between semantic reasoning and execution-grounded coordination, underscoring the need for planning frameworks that jointly model semantic intent, execution constraints, and workflow consistency. Code, data, and evaluation resources are available at: https://github.com/TamuChen18/DisasterBench_Open
R2RAG-Flood: A reasoning-reinforced training-free retrieval augmentation generation framework for flood damage nowcasting
Feb 10, 2026R2RAG-Flood is a reasoning-reinforced, training-free retrieval-augmented generation framework for post-storm property damage nowcasting. Building on an existing supervised tabular predictor, the framework constructs a reasoning-centric knowledge base composed of labeled tabular records, where each sample includes structured predictors, a compact natural language text-mode summary, and a model-generated reasoning trajectory. During inference, R2RAG-Flood issues context-augmented prompts that retrieve and condition on relevant reasoning trajectories from nearby geospatial neighbors and canonical class prototypes, enabling the large language model backbone to emulate and adapt prior reasoning rather than learn new task-specific parameters. Predictions follow a two-stage procedure that first determines property damage occurrence and then refines severity within a three-level Property Damage Extent categorization, with a conditional downgrade step to correct over-predicted severity. In a case study of Harris County, Texas at the 12-digit Hydrologic Unit Code scale, the supervised tabular baseline trained directly on structured predictors achieves 0.714 overall accuracy and 0.859 damage class accuracy for medium and high damage classes. Across seven large language model backbones, R2RAG-Flood attains 0.613 to 0.668 overall accuracy and 0.757 to 0.896 damage class accuracy, approaching the supervised baseline while additionally producing a structured rationale for each prediction. Using a severity-per-cost efficiency metric derived from API pricing and GPU instance costs, lightweight R2RAG-Flood variants demonstrate substantially higher efficiency than both the supervised tabular baseline and larger language models, while requiring no task-specific training or fine-tuning.
DisastQA: A Comprehensive Benchmark for Evaluating Question Answering in Disaster Management
Jan 07, 2026Accurate question answering (QA) in disaster management requires reasoning over uncertain and conflicting information, a setting poorly captured by existing benchmarks built on clean evidence. We introduce DisastQA, a large-scale benchmark of 3,000 rigorously verified questions (2,000 multiple-choice and 1,000 open-ended) spanning eight disaster types. The benchmark is constructed via a human-LLM collaboration pipeline with stratified sampling to ensure balanced coverage. Models are evaluated under varying evidence conditions, from closed-book to noisy evidence integration, enabling separation of internal knowledge from reasoning under imperfect information. For open-ended QA, we propose a human-verified keypoint-based evaluation protocol emphasizing factual completeness over verbosity. Experiments with 20 models reveal substantial divergences from general-purpose leaderboards such as MMLU-Pro. While recent open-weight models approach proprietary systems in clean settings, performance degrades sharply under realistic noise, exposing critical reliability gaps for disaster response. All code, data, and evaluation resources are available at https://github.com/TamuChen18/DisastQA_open.
FloodSQL-Bench: A Retrieval-Augmented Benchmark for Geospatially-Grounded Text-to-SQL
Dec 12, 2025Existing Text-to-SQL benchmarks primarily focus on single-table queries or limited joins in general-purpose domains, and thus fail to reflect the complexity of domain-specific, multi-table and geospatial reasoning, To address this limitation, we introduce FLOODSQL-BENCH, a geospatially grounded benchmark for the flood management domain that integrates heterogeneous datasets through key-based, spatial, and hybrid joins. The benchmark captures realistic flood-related information needs by combining social, infrastructural, and hazard data layers. We systematically evaluate recent large language models with the same retrieval-augmented generation settings and measure their performance across difficulty tiers. By providing a unified, open benchmark grounded in real-world disaster management data, FLOODSQL-BENCH establishes a practical testbed for advancing Text-to-SQL research in high-stakes application domains.
DisastIR: A Comprehensive Information Retrieval Benchmark for Disaster Management
May 20, 2025
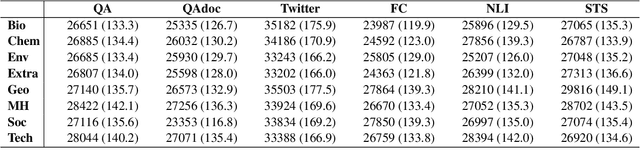


Effective disaster management requires timely access to accurate and contextually relevant information. Existing Information Retrieval (IR) benchmarks, however, focus primarily on general or specialized domains, such as medicine or finance, neglecting the unique linguistic complexity and diverse information needs encountered in disaster management scenarios. To bridge this gap, we introduce DisastIR, the first comprehensive IR evaluation benchmark specifically tailored for disaster management. DisastIR comprises 9,600 diverse user queries and more than 1.3 million labeled query-passage pairs, covering 48 distinct retrieval tasks derived from six search intents and eight general disaster categories that include 301 specific event types. Our evaluations of 30 state-of-the-art retrieval models demonstrate significant performance variances across tasks, with no single model excelling universally. Furthermore, comparative analyses reveal significant performance gaps between general-domain and disaster management-specific tasks, highlighting the necessity of disaster management-specific benchmarks for guiding IR model selection to support effective decision-making in disaster management scenarios. All source codes and DisastIR are available at https://github.com/KaiYin97/Disaster_IR.
CrisisSense-LLM: Instruction Fine-Tuned Large Language Model for Multi-label Social Media Text Classification in Disaster Informatics
Jun 16, 2024



In the field of crisis/disaster informatics, social media is increasingly being used for improving situational awareness to inform response and relief efforts. Efficient and accurate text classification tools have been a focal area of investigation in crisis informatics. However, current methods mostly rely on single-label text classification models, which fails to capture different insights embedded in dynamic and multifaceted disaster-related social media data. This study introduces a novel approach to disaster text classification by enhancing a pre-trained Large Language Model (LLM) through instruction fine-tuning targeted for multi-label classification of disaster-related tweets. Our methodology involves creating a comprehensive instruction dataset from disaster-related tweets, which is then used to fine-tune an open-source LLM, thereby embedding it with disaster-specific knowledge. This fine-tuned model can classify multiple aspects of disaster-related information simultaneously, such as the type of event, informativeness, and involvement of human aid, significantly improving the utility of social media data for situational awareness in disasters. The results demonstrate that this approach enhances the categorization of critical information from social media posts, thereby facilitating a more effective deployment for situational awareness during emergencies. This research paves the way for more advanced, adaptable, and robust disaster management tools, leveraging the capabilities of LLMs to improve real-time situational awareness and response strategies in disaster scenarios.
FloodDamageCast: Building Flood Damage Nowcasting with Machine Learning and Data Augmentation
May 23, 2024



Near-real time estimation of damage to buildings and infrastructure, referred to as damage nowcasting in this study, is crucial for empowering emergency responders to make informed decisions regarding evacuation orders and infrastructure repair priorities during disaster response and recovery. Here, we introduce FloodDamageCast, a machine learning framework tailored for property flood damage nowcasting. The framework leverages heterogeneous data to predict residential flood damage at a resolution of 500 meters by 500 meters within Harris County, Texas, during the 2017 Hurricane Harvey. To deal with data imbalance, FloodDamageCast incorporates a generative adversarial networks-based data augmentation coupled with an efficient machine learning model. The results demonstrate the model's ability to identify high-damage spatial areas that would be overlooked by baseline models. Insights gleaned from flood damage nowcasting can assist emergency responders to more efficiently identify repair needs, allocate resources, and streamline on-the-ground inspections, thereby saving both time and effort.
Boundary-Aware Value Function Generation for Safe Stochastic Motion Planning
Mar 22, 2024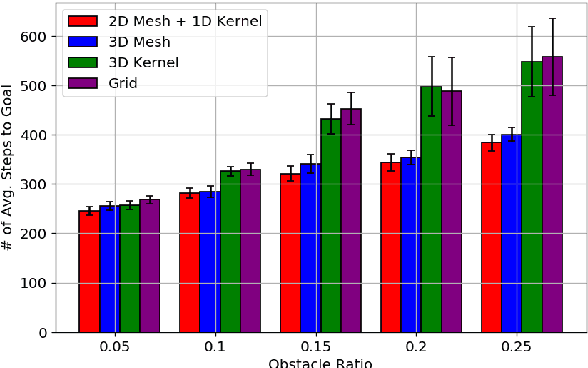
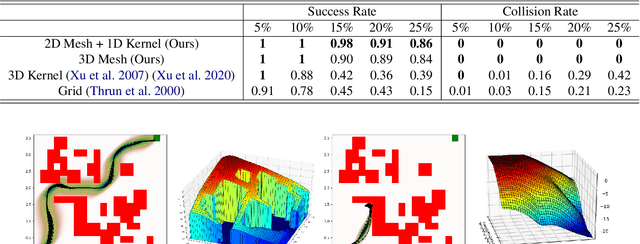
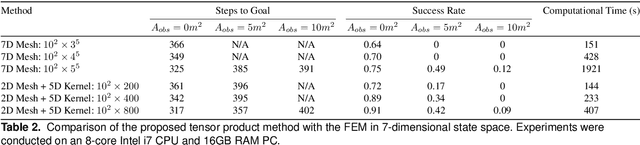
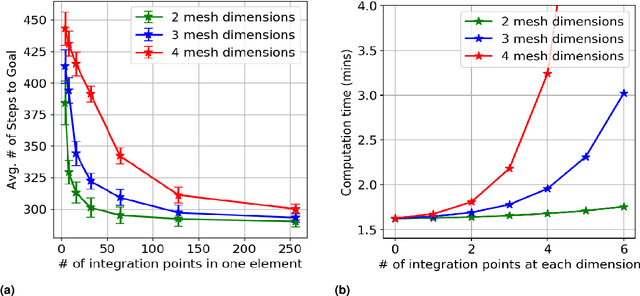
Navigation safety is critical for many autonomous systems such as self-driving vehicles in an urban environment. It requires an explicit consideration of boundary constraints that describe the borders of any infeasible, non-navigable, or unsafe regions. We propose a principled boundary-aware safe stochastic planning framework with promising results. Our method generates a value function that can strictly distinguish the state values between free (safe) and non-navigable (boundary) spaces in the continuous state, naturally leading to a safe boundary-aware policy. At the core of our solution lies a seamless integration of finite elements and kernel-based functions, where the finite elements allow us to characterize safety-critical states' borders accurately, and the kernel-based function speeds up computation for the non-safety-critical states. The proposed method was evaluated through extensive simulations and demonstrated safe navigation behaviors in mobile navigation tasks. Additionally, we demonstrate that our approach can maneuver safely and efficiently in cluttered real-world environments using a ground vehicle with strong external disturbances, such as navigating on a slippery floor and against external human intervention.
Rethinking Urban Flood Risk Assessment By Adapting Health Domain Perspective
Mar 06, 2024Inspired by ideas from health risk assessment, this paper presents a new perspective for flood risk assessment. The proposed perspective focuses on three pillars for examining flood risk: (1) inherent susceptibility, (2) mitigation strategies, and (3) external stressors. These pillars collectively encompass the physical and environmental characteristics of urban areas, the effectiveness of human-intervention measures, and the influence of uncontrollable external factors, offering a fresh point of view for decoding flood risks. For each pillar, we delineate its individual contributions to flood risk and illustrate their interactive and overall impact. The three-pillars model embodies a shift in focus from the quest to precisely model and quantify flood risk to evaluating pathways to high flood risk. The shift in perspective is intended to alleviate the quest for quantifying and predicting flood risk at fine resolutions as a panacea for enhanced flood risk management. The decomposition of flood risk pathways into the three intertwined pillars (i.e., inherent factors, mitigation factors, and external factors) enables evaluation of changes in factors within each pillar enhance and exacerbate flood risk, creating a platform from which to inform plans, decisions, and actions. Building on this foundation, we argue that a flood risk pathway analysis approach, which examines the individual and collective impacts of inherent factors, mitigation strategies, and external stressors, is essential for a nuanced evaluation of flood risk. Accordingly, the proposed perspective could complement the existing frameworks and approaches for flood risk assessment.