 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLPV-MPC for Lateral Control in Full-Scale Autonomous Racing
Mar 14, 2026Autonomous racing has attracted significant attention recently, presenting challenges in selecting an optimal controller that operates within the onboard system's computational limits and meets operational constraints such as limited track time and high costs. This paper introduces a Linear Parameter-Varying Model Predictive Controller (LPV-MPC) for lateral control. Implemented on an IAC AV-24, the controller achieved stable performance at speeds exceeding 160 mph (71.5 m/s). We detail the controller design, the methodology for extracting model parameters, and key system-level and implementation considerations. Additionally, we report results from our final race run, providing a comprehensive analysis of both vehicle dynamics and controller performance. A Python implementation of the framework is available at: https://tinyurl.com/LPV-MPC-acados
Chance-Constrained Sampling-Based MPC for Collision Avoidance in Uncertain Dynamic Environments
Jan 15, 2025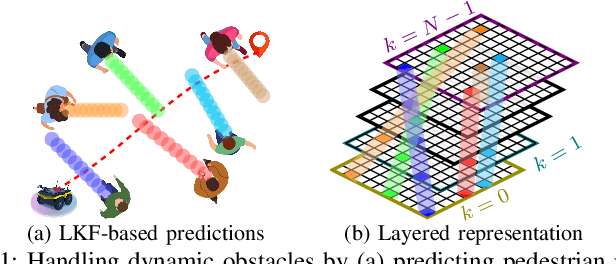
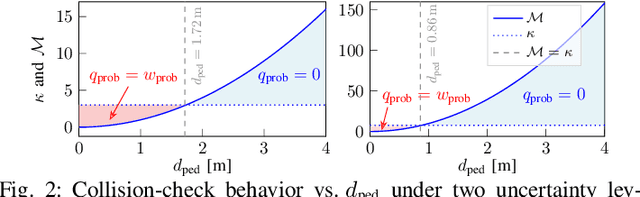


Navigating safely in dynamic and uncertain environments is challenging due to uncertainties in perception and motion. This letter presents C2U-MPPI, a robust sampling-based Model Predictive Control (MPC) framework that addresses these challenges by leveraging the Unscented Model Predictive Path Integral (U-MPPI) control strategy with integrated probabilistic chance constraints, ensuring more reliable and efficient navigation under uncertainty. Unlike gradient-based MPC methods, our approach (i) avoids linearization of system dynamics and directly applies non-convex and nonlinear chance constraints, enabling more accurate and flexible optimization, and (ii) enhances computational efficiency by reformulating probabilistic constraints into a deterministic form and employing a layered dynamic obstacle representation, enabling real-time handling of multiple obstacles. Extensive experiments in simulated and real-world human-shared environments validate the effectiveness of our algorithm against baseline methods, showcasing its capability to generate feasible trajectories and control inputs that adhere to system dynamics and constraints in dynamic settings, enabled by unscented-based sampling strategy and risk-sensitive trajectory evaluation. A supplementary video is available at: https://youtu.be/FptAhvJlQm8
GP-guided MPPI for Efficient Navigation in Complex Unknown Cluttered Environments
Jul 28, 2023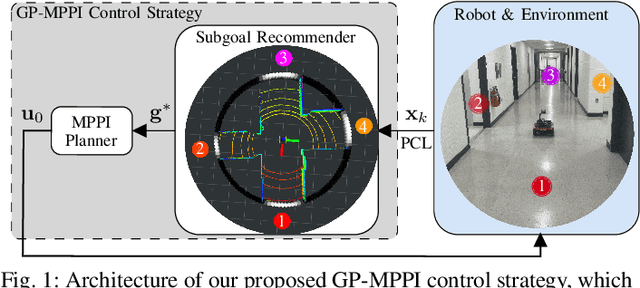

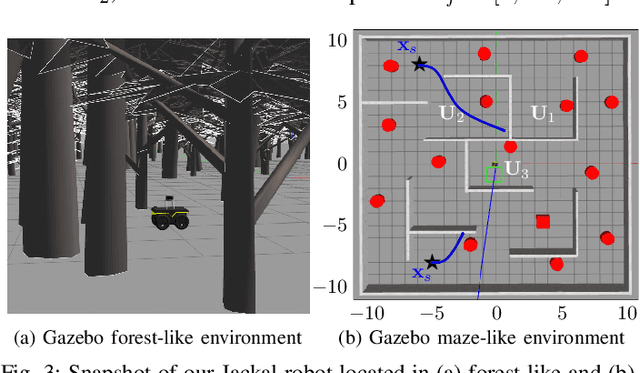
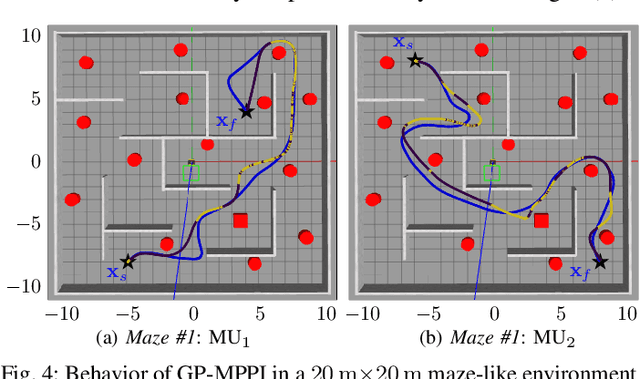
Robotic navigation in unknown, cluttered environments with limited sensing capabilities poses significant challenges in robotics. Local trajectory optimization methods, such as Model Predictive Path Intergal (MPPI), are a promising solution to this challenge. However, global guidance is required to ensure effective navigation, especially when encountering challenging environmental conditions or navigating beyond the planning horizon. This study presents the GP-MPPI, an online learning-based control strategy that integrates MPPI with a local perception model based on Sparse Gaussian Process (SGP). The key idea is to leverage the learning capability of SGP to construct a variance (uncertainty) surface, which enables the robot to learn about the navigable space surrounding it, identify a set of suggested subgoals, and ultimately recommend the optimal subgoal that minimizes a predefined cost function to the local MPPI planner. Afterward, MPPI computes the optimal control sequence that satisfies the robot and collision avoidance constraints. Such an approach eliminates the necessity of a global map of the environment or an offline training process. We validate the efficiency and robustness of our proposed control strategy through both simulated and real-world experiments of 2D autonomous navigation tasks in complex unknown environments, demonstrating its superiority in guiding the robot safely towards its desired goal while avoiding obstacles and escaping entrapment in local minima. The GPU implementation of GP-MPPI, including the supplementary video, is available at https://github.com/IhabMohamed/GP-MPPI.
Towards Efficient MPPI Trajectory Generation with Unscented Guidance: U-MPPI Control Strategy
Jun 21, 2023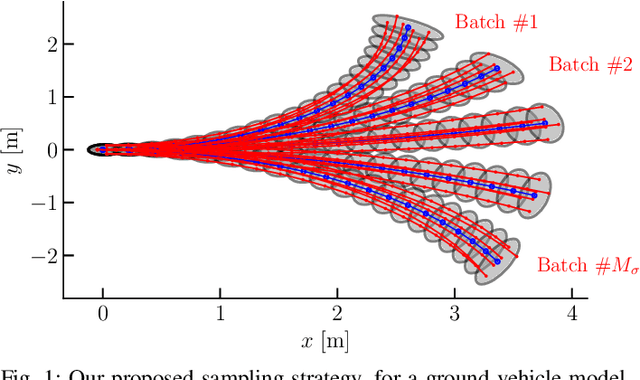
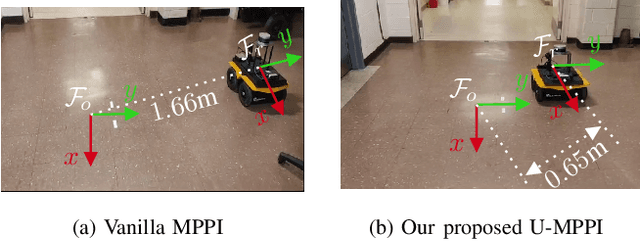
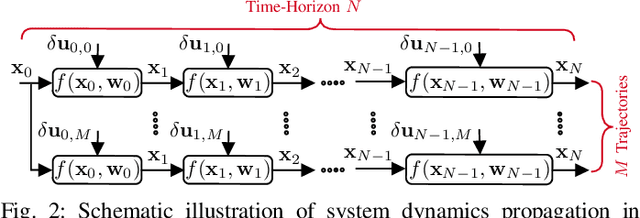
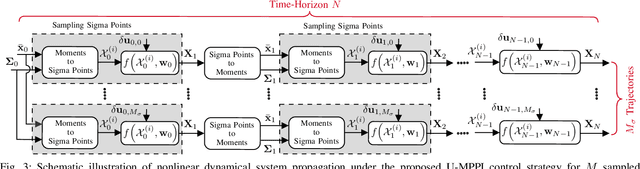
The classical Model Predictive Path Integral (MPPI) control framework lacks reliable safety guarantees since it relies on a risk-neutral trajectory evaluation technique, which can present challenges for safety-critical applications such as autonomous driving. Additionally, if the majority of MPPI sampled trajectories concentrate in high-cost regions, it may generate an infeasible control sequence. To address this challenge, we propose the U-MPPI control strategy, a novel methodology that can effectively manage system uncertainties while integrating a more efficient trajectory sampling strategy. The core concept is to leverage the Unscented Transform (UT) to propagate not only the mean but also the covariance of the system dynamics, going beyond the traditional MPPI method. As a result, it introduces a novel and more efficient trajectory sampling strategy, significantly enhancing state-space exploration and ultimately reducing the risk of being trapped in local minima. Furthermore, by leveraging the uncertainty information provided by UT, we incorporate a risk-sensitive cost function that explicitly accounts for risk or uncertainty throughout the trajectory evaluation process, resulting in a more resilient control system capable of handling uncertain conditions. By conducting extensive simulations of 2D aggressive autonomous navigation in both known and unknown cluttered environments, we verify the efficiency and robustness of our proposed U-MPPI control strategy compared to the baseline MPPI. We further validate the practicality of U-MPPI through real-world demonstrations in unknown cluttered environments, showcasing its superior ability to incorporate both the UT and local costmap into the optimization problem without introducing additional complexity.
Autonomous Navigation of AGVs in Unknown Cluttered Environments: log-MPPI Control Strategy
Mar 30, 2022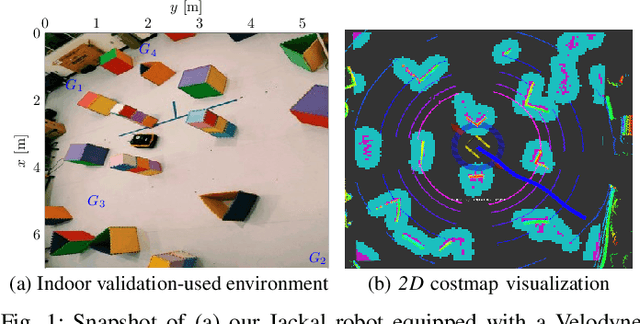
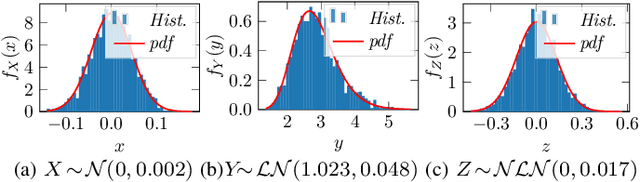
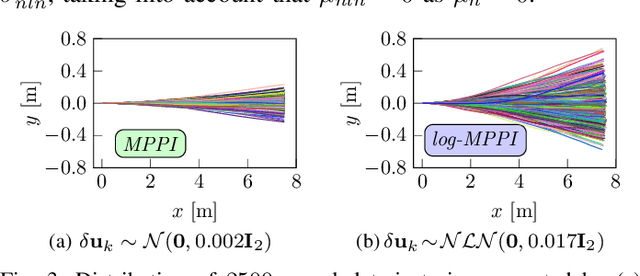
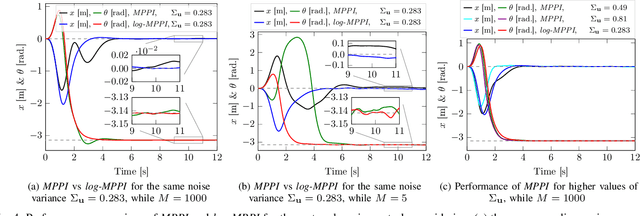
Sampling-based model predictive control (MPC) optimization methods, such as Model Predictive Path Integral (MPPI), have recently shown promising results in various robotic tasks. However, it might produce an infeasible trajectory when the distributions of all sampled trajectories are concentrated within high-cost even infeasible regions. In this study, we propose a new method called log-MPPI equipped with a more effective trajectory sampling distribution policy which significantly improves the trajectory feasibility in terms of satisfying system constraints. The key point is to draw the trajectory samples from the normal log-normal (NLN) mixture distribution, rather than from Gaussian distribution. Furthermore, this work presents a method for collision-free navigation in unknown cluttered environments by incorporating the 2D occupancy grid map into the optimization problem of the sampling-based MPC algorithm. We first validate the efficiency and robustness of our proposed control strategy through extensive simulations of 2D autonomous navigation in different types of cluttered environments as well as the cart-pole swing-up task. We further demonstrate, through real-world experiments, the applicability of log-MPPI for performing a 2D grid-based collision-free navigation in an unknown cluttered environment, showing its superiority to be utilized with the local costmap without adding additional complexity to the optimization problem. A video demonstrating the real-world and simulation results is available at https://youtu.be/_uGWQEFJSN0.
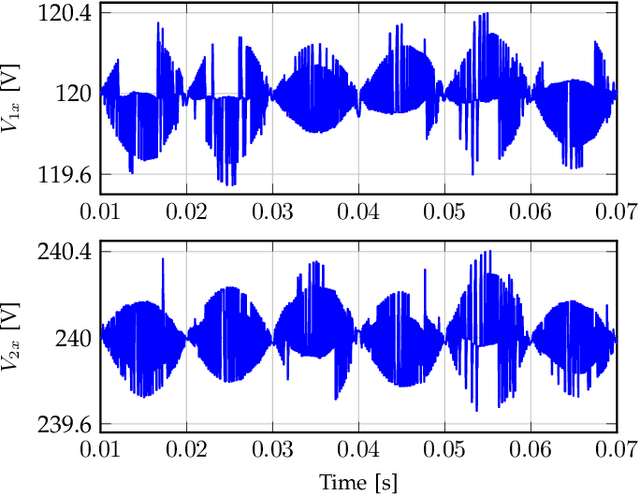
Artificial Neural Network-Based Voltage Control of DC/DC Converter for DC Microgrid Applications
Nov 05, 2021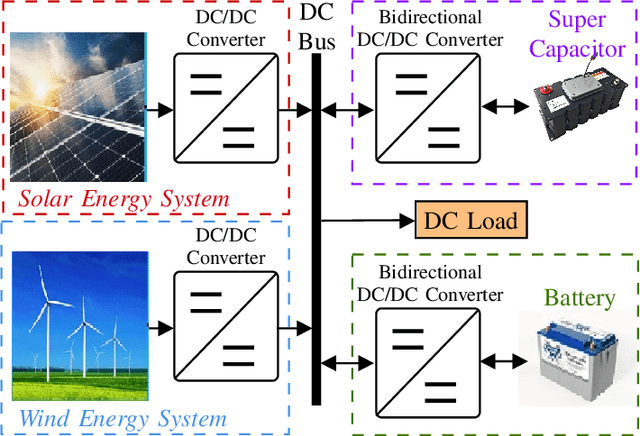
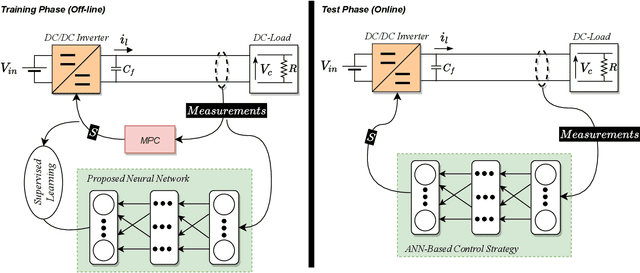
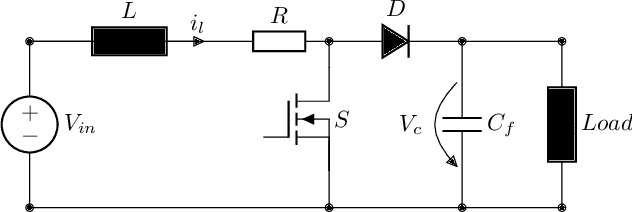
The rapid growth of renewable energy technology enables the concept of microgrid (MG) to be widely accepted in the power systems. Due to the advantages of the DC distribution system such as easy integration of energy storage and less system loss, DC MG attracts significant attention nowadays. The linear controller such as PI or PID is matured and extensively used by the power electronics industry, but their performance is not optimal as system parameters are changed. In this study, an artificial neural network (ANN) based voltage control strategy is proposed for the DC-DC boost converter. In this paper, the model predictive control (MPC) is used as an expert, which provides the data to train the proposed ANN. As ANN is tuned finely, then it is utilized directly to control the step-up DC converter. The main advantage of the ANN is that the neural network system identification decreases the inaccuracy of the system model even with inaccurate parameters and has less computational burden compared to MPC due to its parallel structure. To validate the performance of the proposed ANN, extensive MATLAB/Simulink simulations are carried out. The simulation results show that the ANN-based control strategy has better performance under different loading conditions comparison to the PI controller. The accuracy of the trained ANN model is about 97%, which makes it suitable to be used for DC microgrid applications.
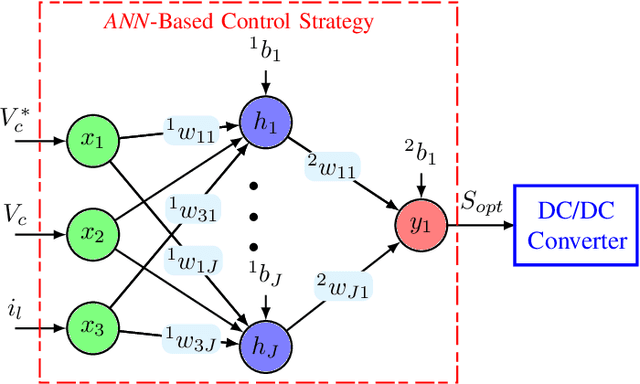
An Artificial Neural Network-Based Model Predictive Control for Three-phase Flying Capacitor Multi-Level Inverter
Oct 15, 2021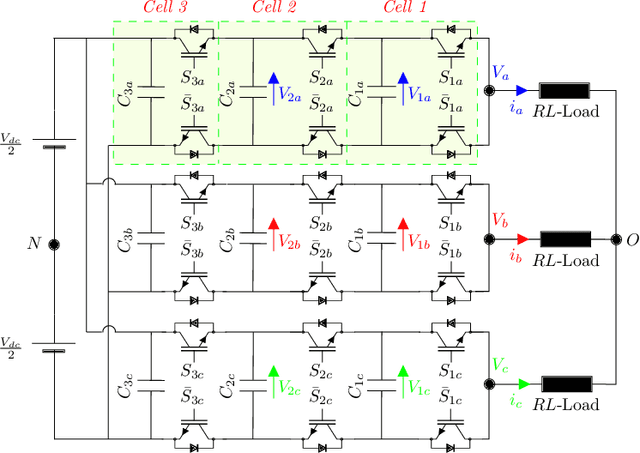
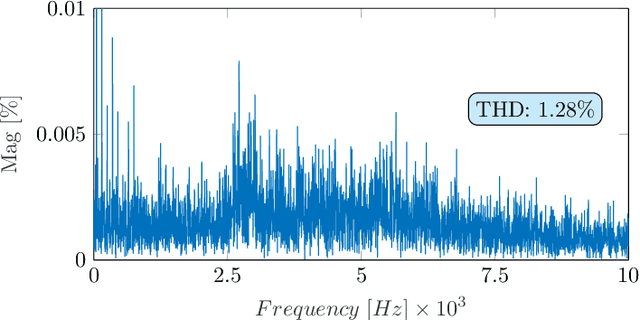
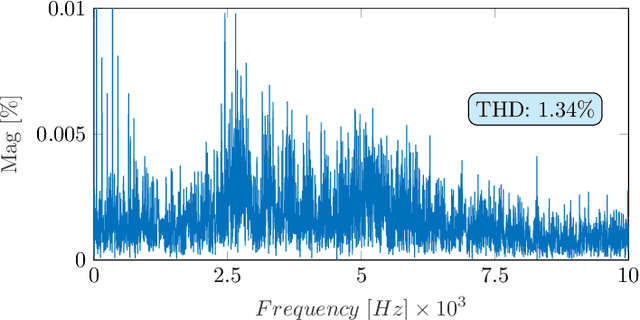
Model predictive control (MPC) has been used widely in power electronics due to its simple concept, fast dynamic response, and good reference tracking. However, it suffers from parametric uncertainties, since it directly relies on the mathematical model of the system to predict the optimal switching states to be used at the next sampling time. As a result, uncertain parameters lead to an ill-designed MPC. Thus, this paper offers a model-free control strategy on the basis of artificial neural networks (ANNs), for mitigating the effects of parameter mismatching while having a little negative impact on the inverter's performance. This method includes two related stages. First, MPC is used as an expert to control the studied converter in order to provide the training data; while, in the second stage, the obtained dataset is utilized to train the proposed ANN which will be used directly to control the inverter without the requirement for the mathematical model of the system. The case study herein is based on a four-level three-cell flying capacitor inverter. In this study, MATLAB/Simulink is used to simulate the performance of the proposed control strategy, taking into account various operating conditions. Afterward, the simulation results are reported in comparison with the conventional MPC scheme, demonstrating the superior performance of the proposed control strategy in terms of getting low total harmonic distortion (THD) and the robustness against parameters mismatch, especially when changes occur in the system parameters.
MPPI-VS: Sampling-Based Model Predictive Control Strategy for Constrained Image-Based and Position-Based Visual Servoing
Apr 11, 2021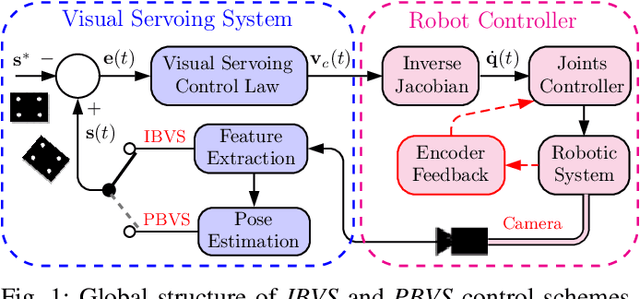
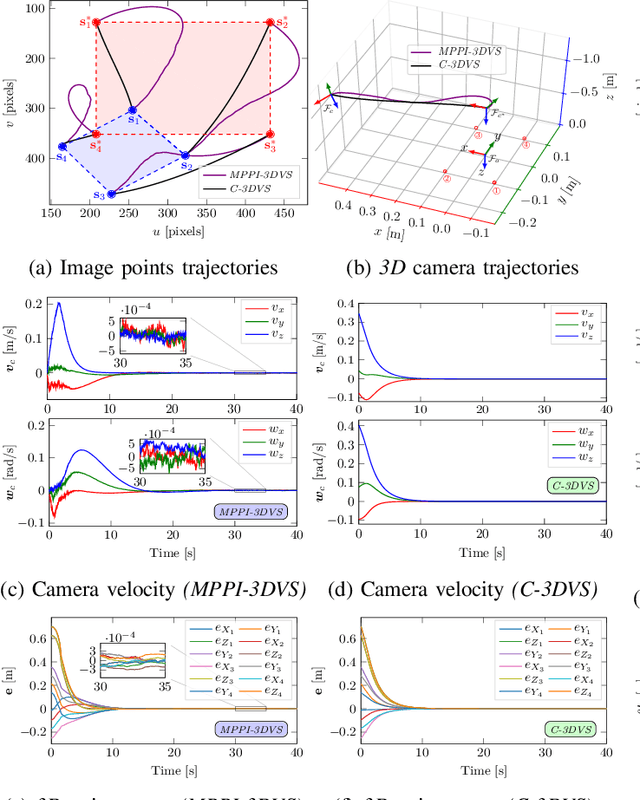
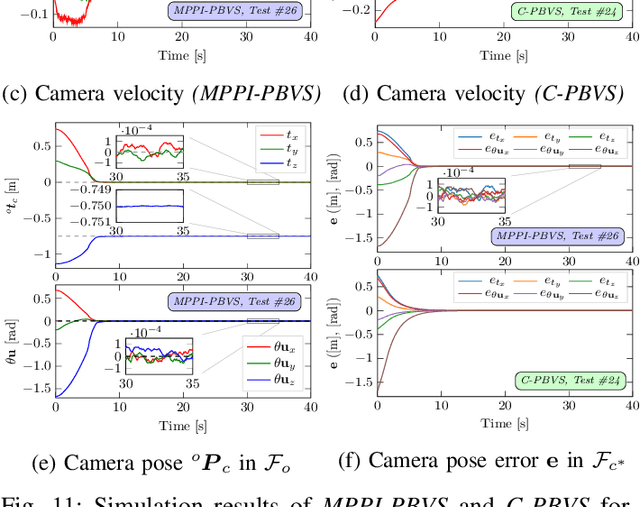
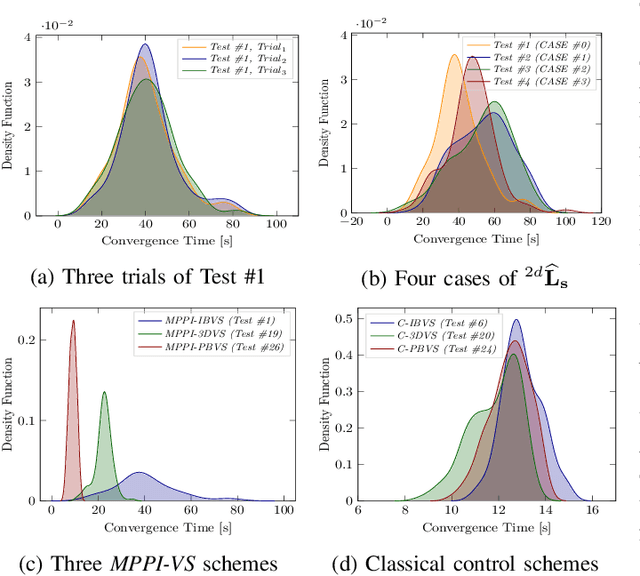
In this paper, we open up new avenues for visual servoing systems built upon the Path Integral (PI) optimal control theory, in which the non-linear partial differential equation (PDE) can be transformed into an expectation over all possible trajectories using the Feynman-Kac (FK) lemma. More precisely, we propose an MPPI-VS control strategy, a real-time and inversion-free control strategy on the basis of sampling-based model predictive control (namely, Model Predictive Path Integral (MPPI) control) algorithm, for both image-based, 3D point, and position-based visual servoing techniques, taking into account the system constraints (such as visibility, 3D, and control constraints) and parametric uncertainties associated with the robot and camera models as well as measurement noise. Contrary to classical visual servoing control schemes, our control strategy directly utilizes the approximation of the interaction matrix, without the need for estimating the interaction matrix inversion or performing the pseudo-inversion. We validate the MPPI-VS control strategy as well as the classical control schemes on a 6-DoF Cartesian robot with an eye-in-hand camera based on the utilization of four points in the image plane as visual features. To better assess and demonstrate the robustness and potential advantages of our proposed control strategy compared to classical schemes, intensive simulations under various operating conditions are carried out and then discussed. The obtained results demonstrate the effectiveness and capability of the proposed scheme in coping easily with the system constraints, as well as its robustness in the presence of large errors in camera parameters and measurements.
Model Predictive Path Integral Control Framework for Partially Observable Navigation: A Quadrotor Case Study
Apr 27, 2020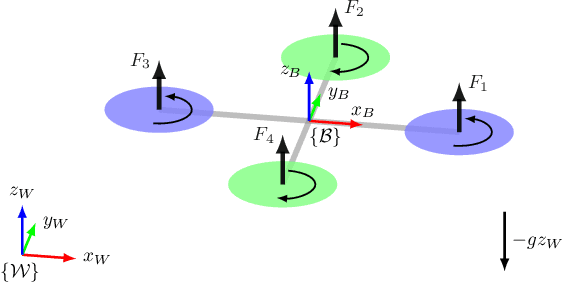
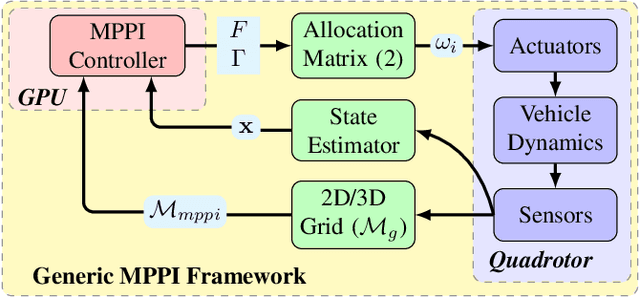
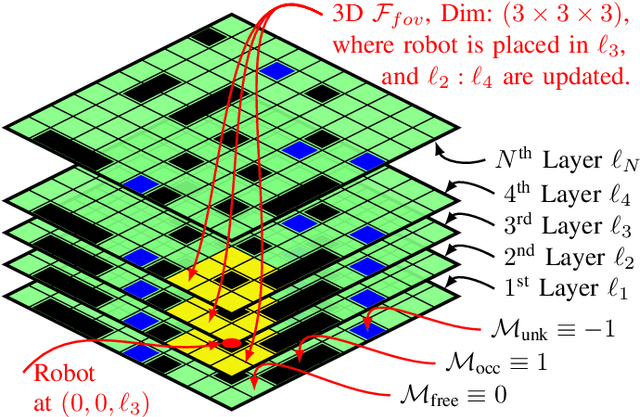
Recently, Model Predictive Path Integral (MPPI) control algorithm has been extensively applied to autonomous navigation tasks, where the cost map is mostly assumed to be known and the 2D navigation tasks are only performed. In this paper, we propose a generic MPPI control framework that can be used for 2D or 3D autonomous navigation tasks in either fully or partially observable environments, which are the most prevalent in robotics applications. This framework exploits directly the 3D-voxel grid acquired from an on-board sensing system for performing collision-free navigation. We test the framework, in realistic RotorS-based simulation, on goal-oriented quadrotor navigation tasks in a cluttered environment, for both fully and partially observable scenarios. Preliminary results demonstrate that the proposed framework works perfectly, under partial observability, in 2D and 3D cluttered environments.
A 2D laser rangefinder scans dataset of standard EUR pallets
Mar 13, 2019
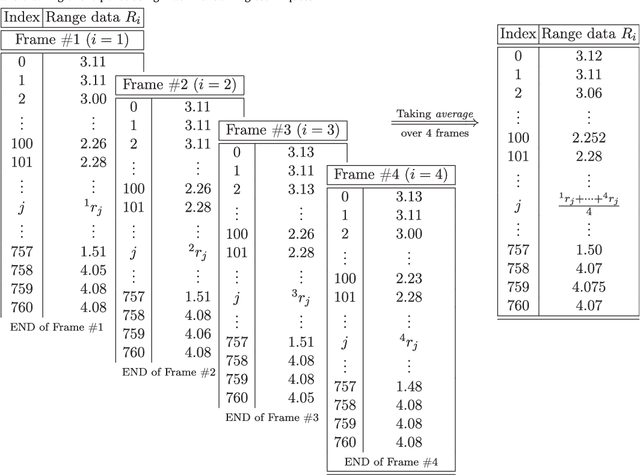
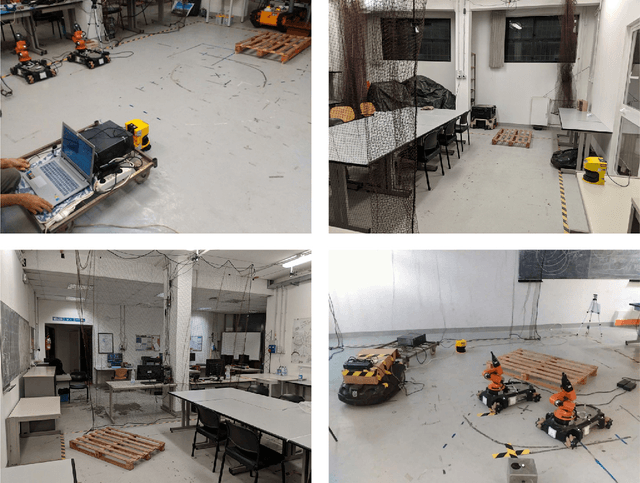
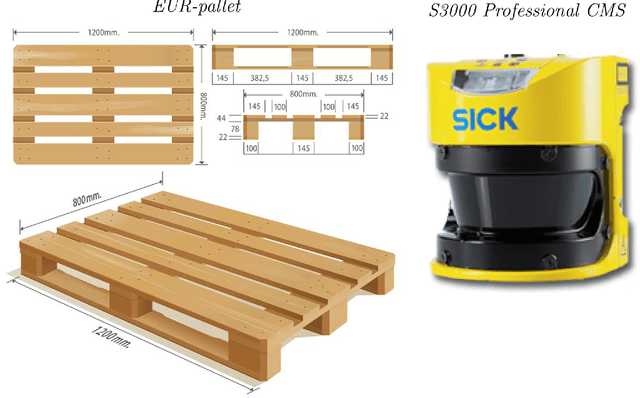
In the past few years, the technology of automated guided vehicles (AGVs) has notably advanced. In particular, in the context of factory and warehouse automation, different approaches have been presented for detecting and localizing pallets inside warehouses and shop-floor environments. In a related research paper [1], we show that an AGVs can detect, localize, and track pallets using machine learning techniques based only on the data of an on-board 2D laser rangefinder. Such sensor is very common in industrial scenarios due to its simplicity and robustness, but it can only provide a limited amount of data. Therefore, it has been neglected in the past in favor of more complex solutions. In this paper, we release to the community the data we collected in [1] for further research activities in the field of pallet localization and tracking. The dataset comprises a collection of 565 2D scans from real-world environments, which are divided into 340 samples where pallets are present, and 225 samples where they are not. The data have been manually labelled and are provided in different formats.