 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Path Integral Control Framework for Partially Observable Navigation: A Quadrotor Case Study
Paper and Code
Apr 27, 2020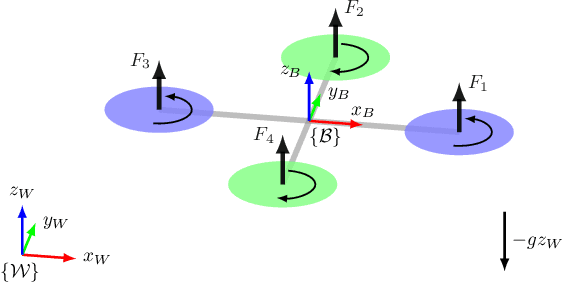
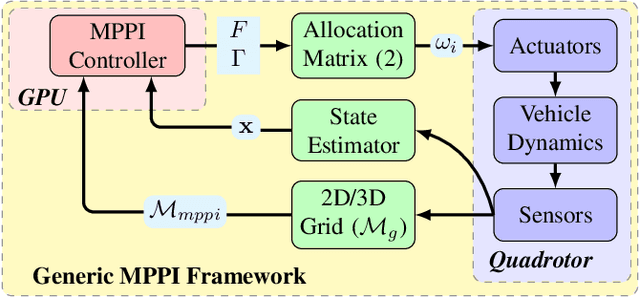
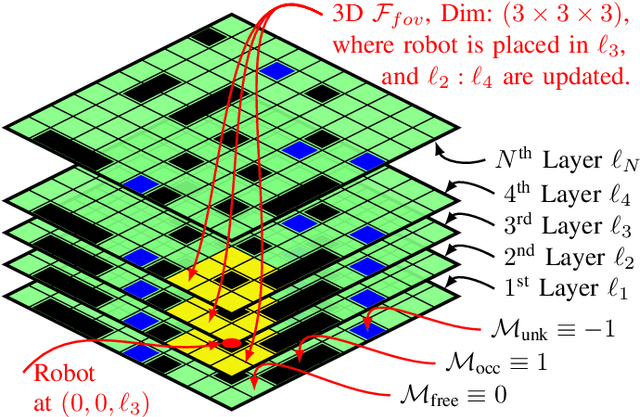
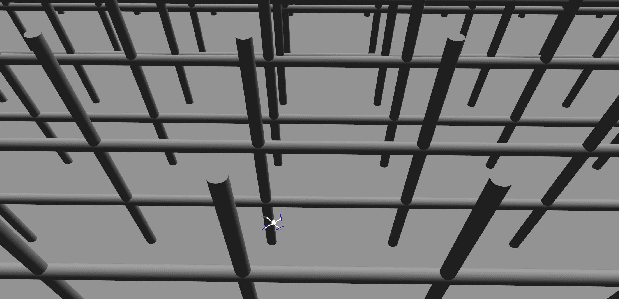
Recently, Model Predictive Path Integral (MPPI) control algorithm has been extensively applied to autonomous navigation tasks, where the cost map is mostly assumed to be known and the 2D navigation tasks are only performed. In this paper, we propose a generic MPPI control framework that can be used for 2D or 3D autonomous navigation tasks in either fully or partially observable environments, which are the most prevalent in robotics applications. This framework exploits directly the 3D-voxel grid acquired from an on-board sensing system for performing collision-free navigation. We test the framework, in realistic RotorS-based simulation, on goal-oriented quadrotor navigation tasks in a cluttered environment, for both fully and partially observable scenarios. Preliminary results demonstrate that the proposed framework works perfectly, under partial observability, in 2D and 3D cluttered environments.