 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhraseStereo: The First Open-Vocabulary Stereo Image Segmentation Dataset
Oct 01, 2025Understanding how natural language phrases correspond to specific regions in images is a key challenge in multimodal semantic segmentation. Recent advances in phrase grounding are largely limited to single-view images, neglecting the rich geometric cues available in stereo vision. For this, we introduce PhraseStereo, the first novel dataset that brings phrase-region segmentation to stereo image pairs. PhraseStereo builds upon the PhraseCut dataset by leveraging GenStereo to generate accurate right-view images from existing single-view data, enabling the extension of phrase grounding into the stereo domain. This new setting introduces unique challenges and opportunities for multimodal learning, particularly in leveraging depth cues for more precise and context-aware grounding. By providing stereo image pairs with aligned segmentation masks and phrase annotations, PhraseStereo lays the foundation for future research at the intersection of language, vision, and 3D perception, encouraging the development of models that can reason jointly over semantics and geometry. The PhraseStereo dataset will be released online upon acceptance of this work.
Model Predictive Path Integral Control Framework for Partially Observable Navigation: A Quadrotor Case Study
Apr 27, 2020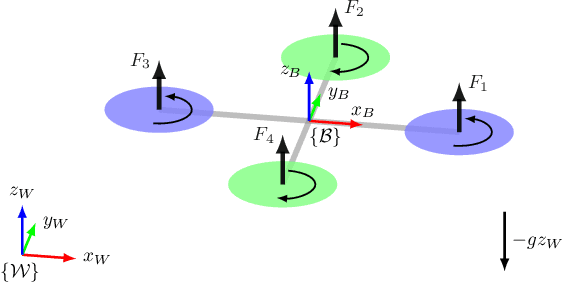
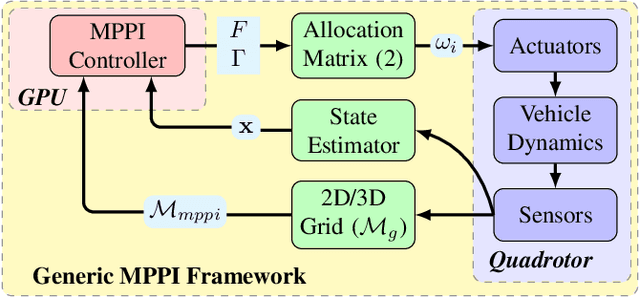
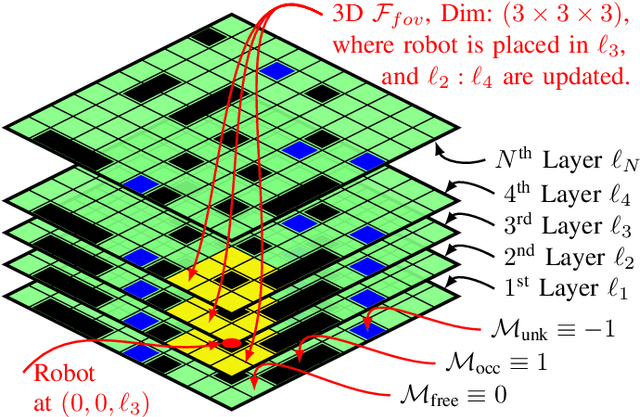
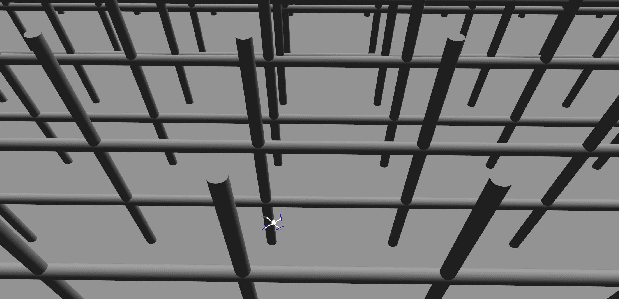
Recently, Model Predictive Path Integral (MPPI) control algorithm has been extensively applied to autonomous navigation tasks, where the cost map is mostly assumed to be known and the 2D navigation tasks are only performed. In this paper, we propose a generic MPPI control framework that can be used for 2D or 3D autonomous navigation tasks in either fully or partially observable environments, which are the most prevalent in robotics applications. This framework exploits directly the 3D-voxel grid acquired from an on-board sensing system for performing collision-free navigation. We test the framework, in realistic RotorS-based simulation, on goal-oriented quadrotor navigation tasks in a cluttered environment, for both fully and partially observable scenarios. Preliminary results demonstrate that the proposed framework works perfectly, under partial observability, in 2D and 3D cluttered environments.
A Vision-based Computed Torque Control for Parallel Kinematic Machines
Oct 15, 2008

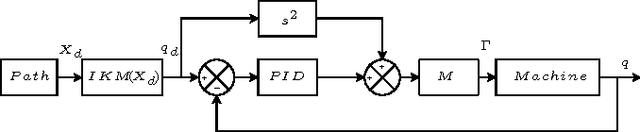

In this paper, a novel approach for parallel kinematic machine control relying on a fast exteroceptive measure is implemented and validated on the Orthoglide robot. This approach begins with rewriting the robot models as a function of the only end-effector pose. It is shown that such an operation reduces the model complexity. Then, this approach uses a classical Cartesian space computed torque control with a fast exteroceptive measure, reducing the control schemes complexity. Simulation results are given to show the expected performance improvements and experiments prove the practical feasibility of the approach.