Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Vision-based Computed Torque Control for Parallel Kinematic Machines
Oct 15, 2008

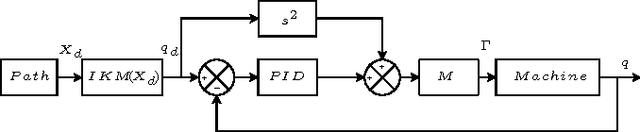

In this paper, a novel approach for parallel kinematic machine control relying on a fast exteroceptive measure is implemented and validated on the Orthoglide robot. This approach begins with rewriting the robot models as a function of the only end-effector pose. It is shown that such an operation reduces the model complexity. Then, this approach uses a classical Cartesian space computed torque control with a fast exteroceptive measure, reducing the control schemes complexity. Simulation results are given to show the expected performance improvements and experiments prove the practical feasibility of the approach.
* IEEE International Conference on Robotics and Automation, Pasadena
: \'Etats-Unis d'Am\'erique (2008)
Via