 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe eel-like robot
Sep 02, 2009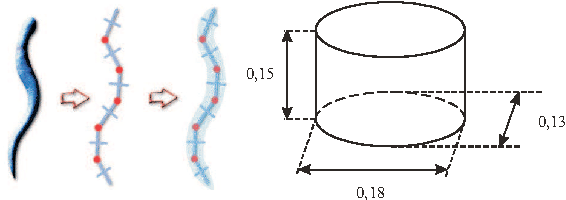
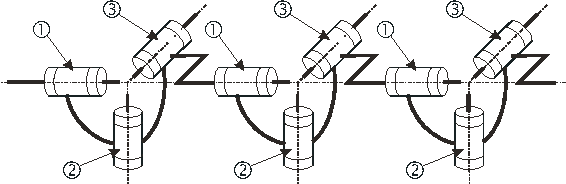
The aim of this project is to design, study and build an "eel-like robot" prototype able to swim in three dimensions. The study is based on the analysis of eel swimming and results in the realization of a prototype with 12 vertebrae, a skin and a head with two fins. To reach these objectives, a multidisciplinary group of teams and laboratories has been formed in the framework of two French projects.
A Vision-based Computed Torque Control for Parallel Kinematic Machines
Oct 15, 2008

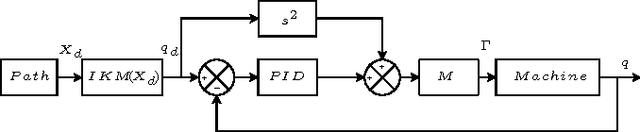

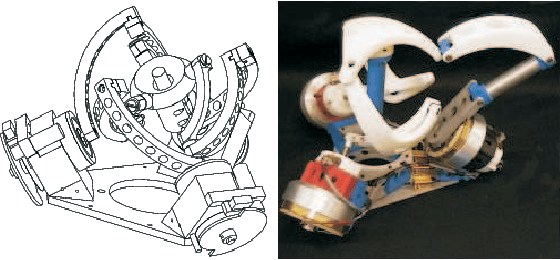
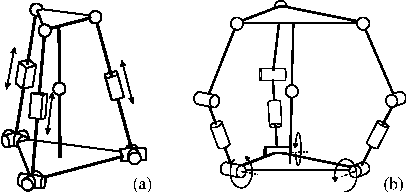
In this paper, a novel approach for parallel kinematic machine control relying on a fast exteroceptive measure is implemented and validated on the Orthoglide robot. This approach begins with rewriting the robot models as a function of the only end-effector pose. It is shown that such an operation reduces the model complexity. Then, this approach uses a classical Cartesian space computed torque control with a fast exteroceptive measure, reducing the control schemes complexity. Simulation results are given to show the expected performance improvements and experiments prove the practical feasibility of the approach.