 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDense Scene Reconstruction from Light-Field Images Affected by Rolling Shutter
Dec 04, 2024



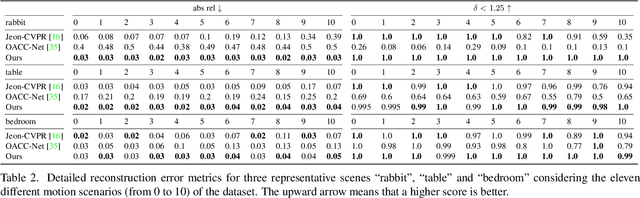
This paper presents a dense depth estimation approach from light-field (LF) images that is able to compensate for strong rolling shutter (RS) effects. Our method estimates RS compensated views and dense RS compensated disparity maps. We present a two-stage method based on a 2D Gaussians Splatting that allows for a ``render and compare" strategy with a point cloud formulation. In the first stage, a subset of sub-aperture images is used to estimate an RS agnostic 3D shape that is related to the scene target shape ``up to a motion". In the second stage, the deformation of the 3D shape is computed by estimating an admissible camera motion. We demonstrate the effectiveness and advantages of this approach through several experiments conducted for different scenes and types of motions. Due to lack of suitable datasets for evaluation, we also present a new carefully designed synthetic dataset of RS LF images. The source code, trained models and dataset will be made publicly available at: https://github.com/ICB-Vision-AI/DenseRSLF
Robot Hand-Eye Calibration using Structure-from-Motion
Nov 21, 2023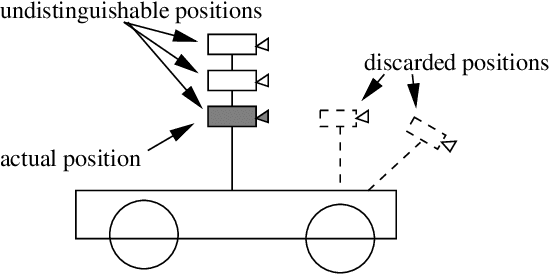
In this paper we propose a new flexible method for hand-eye calibration. The vast majority of existing hand-eye calibration techniques requires a calibration rig which is used in conjunction with camera pose estimation methods. Instead, we combine structure-from-motion with known robot motions and we show that the solution can be obtained in linear form. The latter solves for both the hand-eye parameters and for the unknown scale factor inherent with structure-from-motion methods. The algebraic analysis that is made possible with such a linear formulation allows to investigate not only the well known case of general screw motions but also such singular motions as pure translations, pure rotations, and planar motions. In essence, the robot-mounted camera looks to an unknown rigid layout, tracks points over an image sequence and estimates the camera-to-robot relationship. Such a self calibration process is relevant for unmanned vehicles, robots working in remote places, and so forth. We conduct a large number of experiments which validate the quality of the method by comparing it with existing ones.
Joint 3D Shape and Motion Estimation from Rolling Shutter Light-Field Images
Nov 02, 2023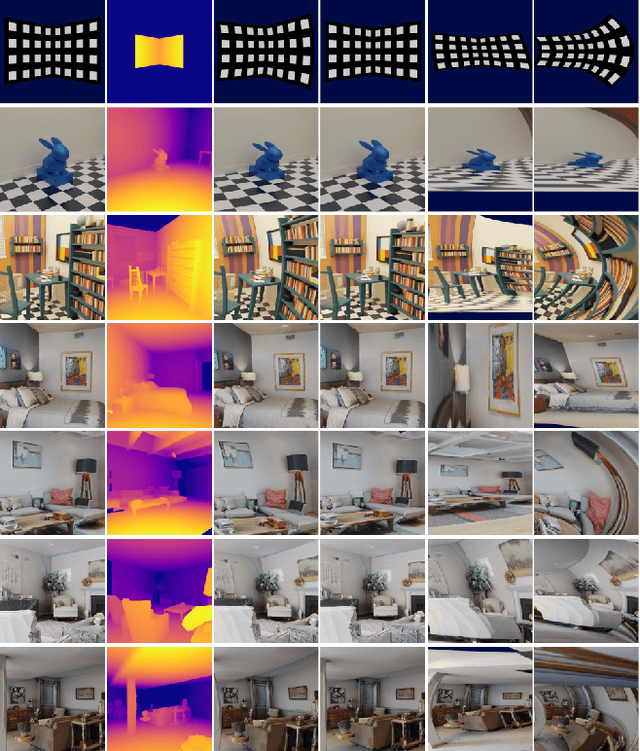
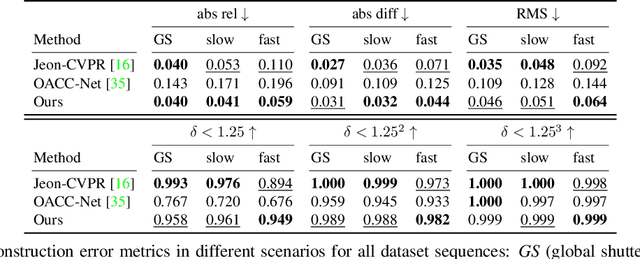
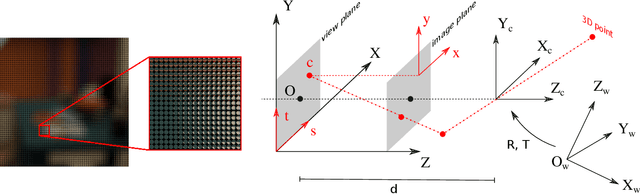
In this paper, we propose an approach to address the problem of 3D reconstruction of scenes from a single image captured by a light-field camera equipped with a rolling shutter sensor. Our method leverages the 3D information cues present in the light-field and the motion information provided by the rolling shutter effect. We present a generic model for the imaging process of this sensor and a two-stage algorithm that minimizes the re-projection error while considering the position and motion of the camera in a motion-shape bundle adjustment estimation strategy. Thereby, we provide an instantaneous 3D shape-and-pose-and-velocity sensing paradigm. To the best of our knowledge, this is the first study to leverage this type of sensor for this purpose. We also present a new benchmark dataset composed of different light-fields showing rolling shutter effects, which can be used as a common base to improve the evaluation and tracking the progress in the field. We demonstrate the effectiveness and advantages of our approach through several experiments conducted for different scenes and types of motions. The source code and dataset are publicly available at: https://github.com/ICB-Vision-AI/RSLF
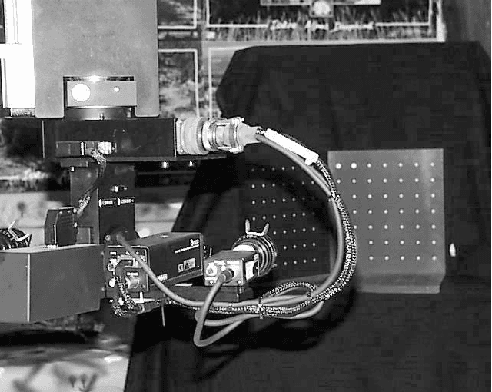
Safe Path following for Middle Ear Surgery
Jan 03, 2023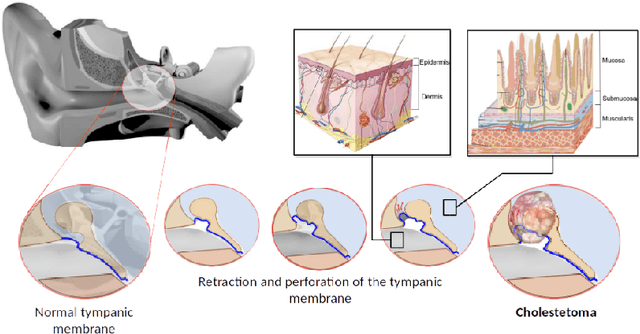


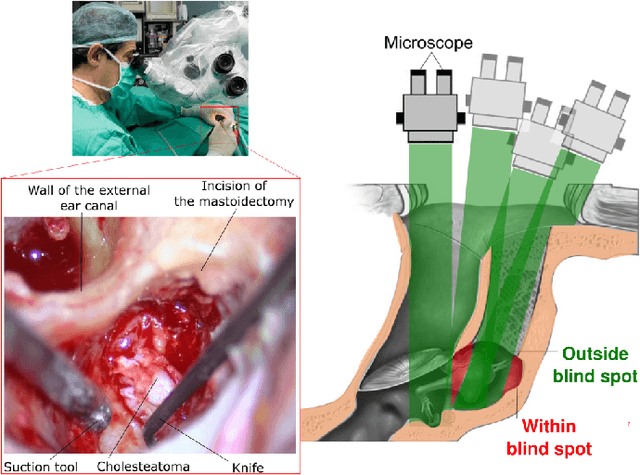
This article formulates a generic representation of a path-following controller operating under contained motion, which was developed in the context of surgical robotics. It reports two types of constrained motion: i) Bilateral Constrained Motion, also called Remote Center Motion (RCM), and ii) Unilaterally Constrained Motion (UCM). In the first case, the incision hole has almost the same diameter as the robotic tool. In contrast, in the second state, the diameter of the incision orifice is larger than the tool diameter. The second case offers more space where the surgical instrument moves freely without constraints before touching the incision wall. The proposed method combines two tasks that must operate hierarchically: i) respect the RCM or UCM constraints formulated by equality or inequality, respectively, and ii) perform a surgical assignment, e.g., scanning or ablation expressed as a 3D path-following task. The proposed methods and materials were tested first on our simulator that mimics realistic conditions of middle ear surgery, and then on an experimental platform. Different validation scenarios were carried out experimentally to assess quantitatively and qualitatively each developed approach. Although ultimate precision was not the goal of this work, our concept is validated with enough accuracy (inferior to 100 micrometres) for ear surgery.
A Vision-based Computed Torque Control for Parallel Kinematic Machines
Oct 15, 2008

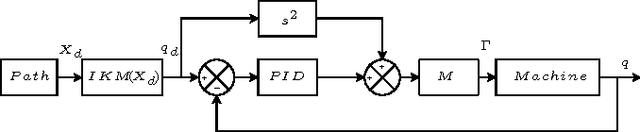

In this paper, a novel approach for parallel kinematic machine control relying on a fast exteroceptive measure is implemented and validated on the Orthoglide robot. This approach begins with rewriting the robot models as a function of the only end-effector pose. It is shown that such an operation reduces the model complexity. Then, this approach uses a classical Cartesian space computed torque control with a fast exteroceptive measure, reducing the control schemes complexity. Simulation results are given to show the expected performance improvements and experiments prove the practical feasibility of the approach.