 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Path following for Middle Ear Surgery
Paper and Code
Jan 03, 2023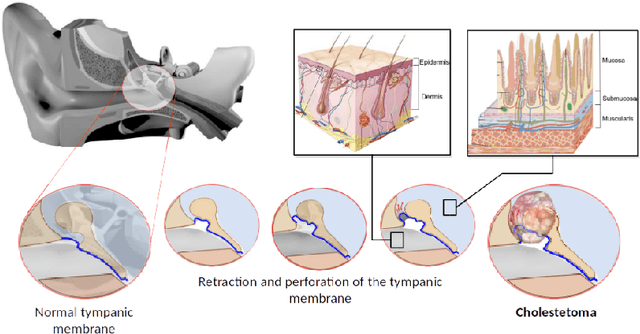


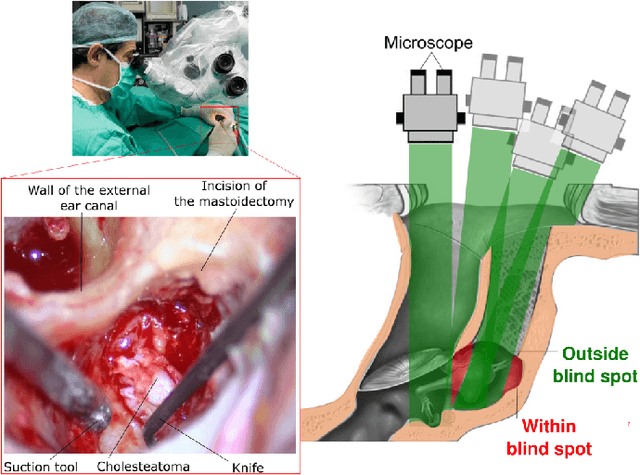
This article formulates a generic representation of a path-following controller operating under contained motion, which was developed in the context of surgical robotics. It reports two types of constrained motion: i) Bilateral Constrained Motion, also called Remote Center Motion (RCM), and ii) Unilaterally Constrained Motion (UCM). In the first case, the incision hole has almost the same diameter as the robotic tool. In contrast, in the second state, the diameter of the incision orifice is larger than the tool diameter. The second case offers more space where the surgical instrument moves freely without constraints before touching the incision wall. The proposed method combines two tasks that must operate hierarchically: i) respect the RCM or UCM constraints formulated by equality or inequality, respectively, and ii) perform a surgical assignment, e.g., scanning or ablation expressed as a 3D path-following task. The proposed methods and materials were tested first on our simulator that mimics realistic conditions of middle ear surgery, and then on an experimental platform. Different validation scenarios were carried out experimentally to assess quantitatively and qualitatively each developed approach. Although ultimate precision was not the goal of this work, our concept is validated with enough accuracy (inferior to 100 micrometres) for ear surgery.