 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDense Scene Reconstruction from Light-Field Images Affected by Rolling Shutter
Dec 04, 2024



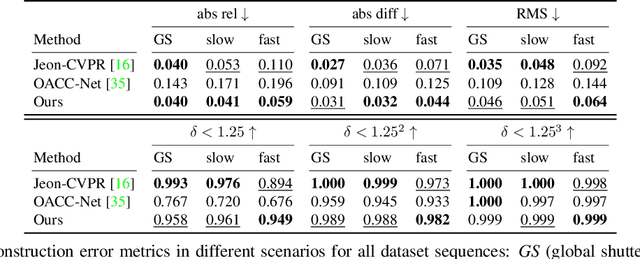
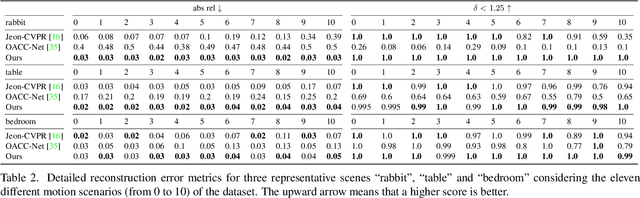
This paper presents a dense depth estimation approach from light-field (LF) images that is able to compensate for strong rolling shutter (RS) effects. Our method estimates RS compensated views and dense RS compensated disparity maps. We present a two-stage method based on a 2D Gaussians Splatting that allows for a ``render and compare" strategy with a point cloud formulation. In the first stage, a subset of sub-aperture images is used to estimate an RS agnostic 3D shape that is related to the scene target shape ``up to a motion". In the second stage, the deformation of the 3D shape is computed by estimating an admissible camera motion. We demonstrate the effectiveness and advantages of this approach through several experiments conducted for different scenes and types of motions. Due to lack of suitable datasets for evaluation, we also present a new carefully designed synthetic dataset of RS LF images. The source code, trained models and dataset will be made publicly available at: https://github.com/ICB-Vision-AI/DenseRSLF
Joint 3D Shape and Motion Estimation from Rolling Shutter Light-Field Images
Nov 02, 2023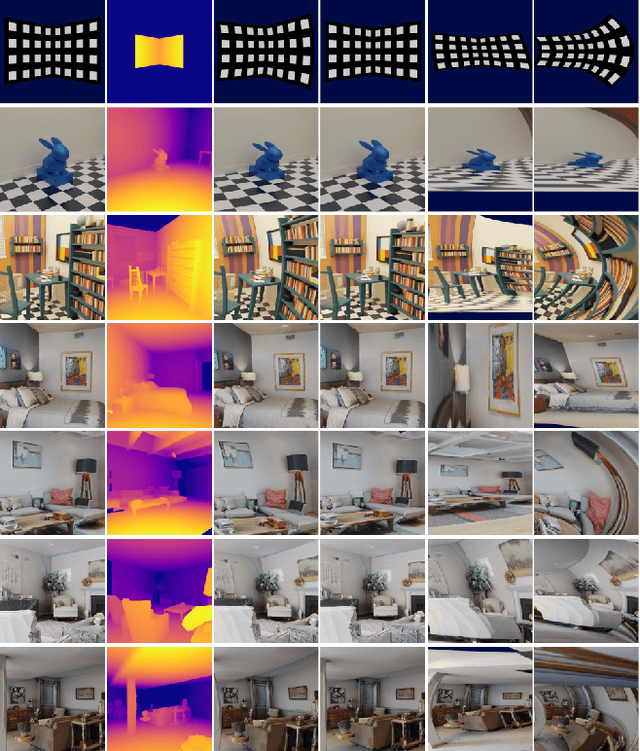
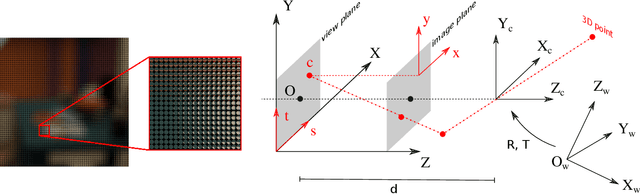
In this paper, we propose an approach to address the problem of 3D reconstruction of scenes from a single image captured by a light-field camera equipped with a rolling shutter sensor. Our method leverages the 3D information cues present in the light-field and the motion information provided by the rolling shutter effect. We present a generic model for the imaging process of this sensor and a two-stage algorithm that minimizes the re-projection error while considering the position and motion of the camera in a motion-shape bundle adjustment estimation strategy. Thereby, we provide an instantaneous 3D shape-and-pose-and-velocity sensing paradigm. To the best of our knowledge, this is the first study to leverage this type of sensor for this purpose. We also present a new benchmark dataset composed of different light-fields showing rolling shutter effects, which can be used as a common base to improve the evaluation and tracking the progress in the field. We demonstrate the effectiveness and advantages of our approach through several experiments conducted for different scenes and types of motions. The source code and dataset are publicly available at: https://github.com/ICB-Vision-AI/RSLF