 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisually Guided Object Grasping
Nov 21, 2023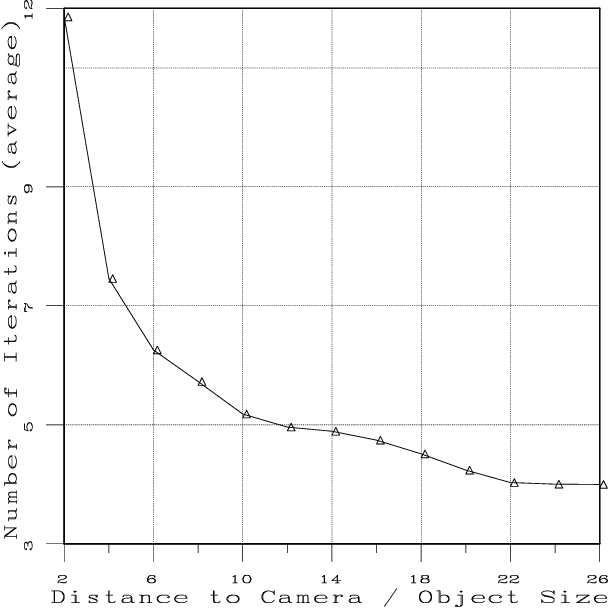
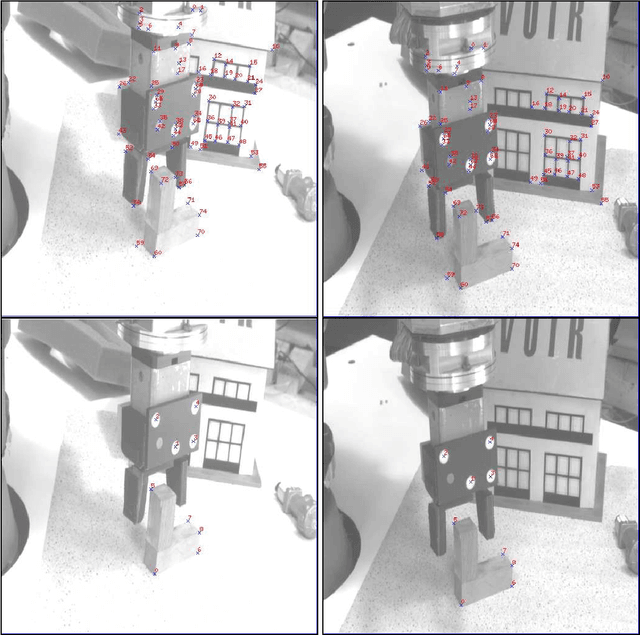
In this paper we present a visual servoing approach to the problem of object grasping and more generally, to the problem of aligning an end-effector with an object. First we extend the method proposed by Espiau et al. [1] to the case of a camera which is not mounted onto the robot being controlled and we stress the importance of the real-time estimation of the image Jacobian. Second, we show how to represent a grasp or more generally, an alignment between two solids in 3-D projective space using an uncalibrated stereo rig. Such a 3-D projective representation is view-invariant in the sense that it can be easily mapped into an image set-point without any knowledge about the camera parameters. Third, we perform an analysis of the performances of the visual servoing algorithm and of the grasping precision that can be expected from this type of approach.
Robot Hand-Eye Calibration using Structure-from-Motion
Nov 21, 2023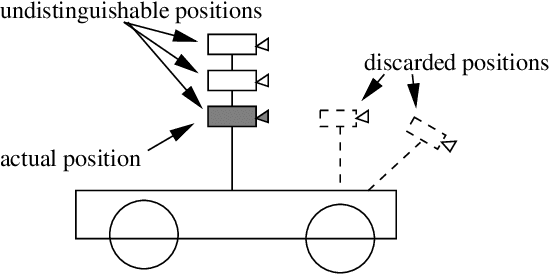
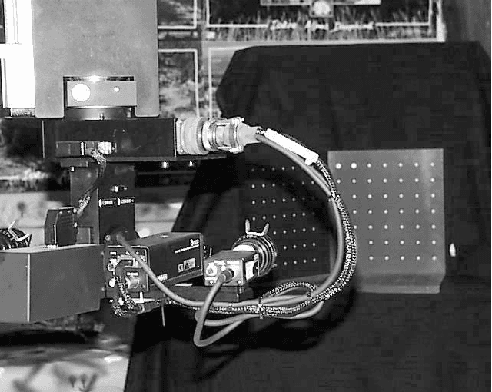
In this paper we propose a new flexible method for hand-eye calibration. The vast majority of existing hand-eye calibration techniques requires a calibration rig which is used in conjunction with camera pose estimation methods. Instead, we combine structure-from-motion with known robot motions and we show that the solution can be obtained in linear form. The latter solves for both the hand-eye parameters and for the unknown scale factor inherent with structure-from-motion methods. The algebraic analysis that is made possible with such a linear formulation allows to investigate not only the well known case of general screw motions but also such singular motions as pure translations, pure rotations, and planar motions. In essence, the robot-mounted camera looks to an unknown rigid layout, tracks points over an image sequence and estimates the camera-to-robot relationship. Such a self calibration process is relevant for unmanned vehicles, robots working in remote places, and so forth. We conduct a large number of experiments which validate the quality of the method by comparing it with existing ones.