 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA 2D laser rangefinder scans dataset of standard EUR pallets
Paper and Code
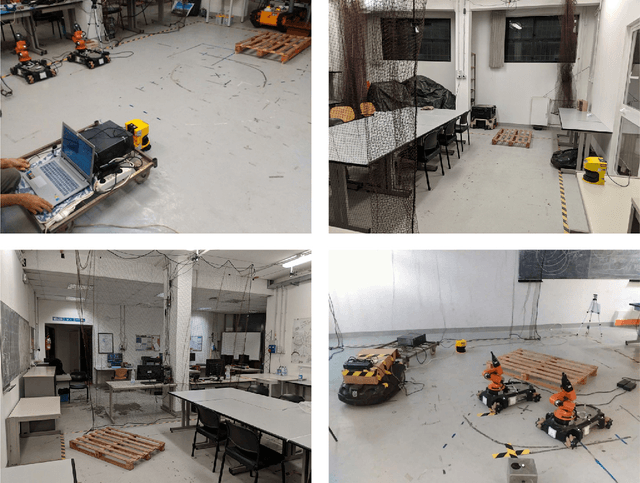
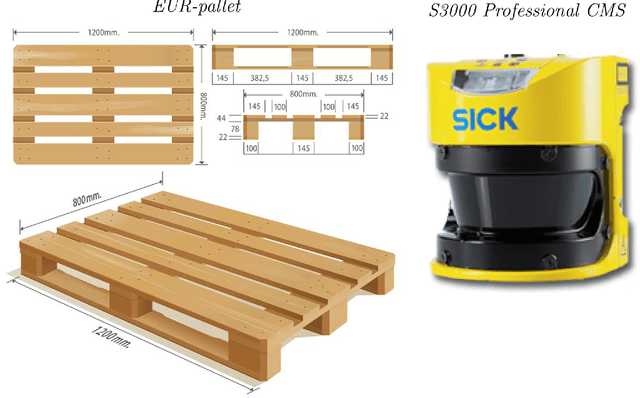
In the past few years, the technology of automated guided vehicles (AGVs) has notably advanced. In particular, in the context of factory and warehouse automation, different approaches have been presented for detecting and localizing pallets inside warehouses and shop-floor environments. In a related research paper [1], we show that an AGVs can detect, localize, and track pallets using machine learning techniques based only on the data of an on-board 2D laser rangefinder. Such sensor is very common in industrial scenarios due to its simplicity and robustness, but it can only provide a limited amount of data. Therefore, it has been neglected in the past in favor of more complex solutions. In this paper, we release to the community the data we collected in [1] for further research activities in the field of pallet localization and tracking. The dataset comprises a collection of 565 2D scans from real-world environments, which are divided into 340 samples where pallets are present, and 225 samples where they are not. The data have been manually labelled and are provided in different formats.