 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Detection of Electronic Components in Waste Printed Circuit Boards: A Transformer-Based Approach
Sep 24, 2024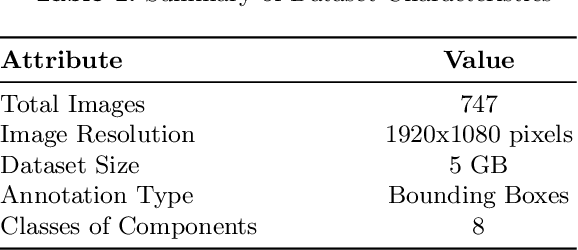

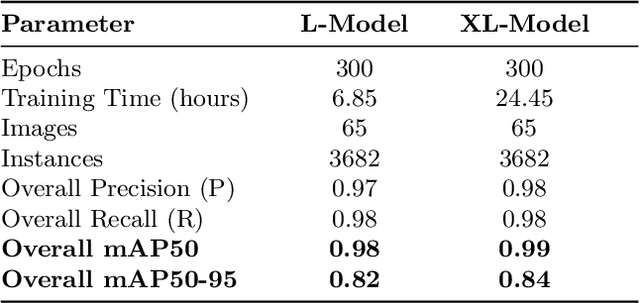
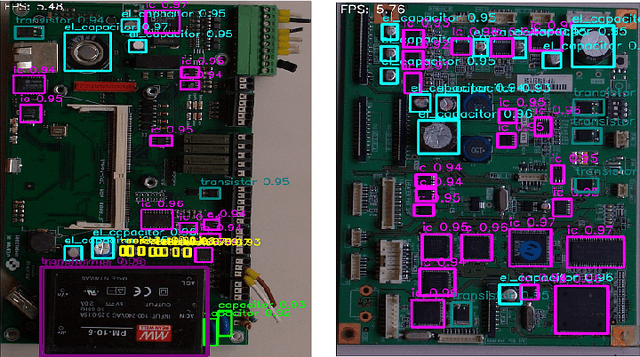
Critical Raw Materials (CRMs) such as copper, manganese, gallium, and various rare earths have great importance for the electronic industry. To increase the concentration of individual CRMs and thus make their extraction from Waste Printed Circuit Boards (WPCBs) convenient, we have proposed a practical approach that involves selective disassembling of the different types of electronic components from WPCBs using mechatronic systems guided by artificial vision techniques. In this paper we evaluate the real-time accuracy of electronic component detection and localization of the Real-Time DEtection TRansformer model architecture. Transformers have recently become very popular for the extraordinary results obtained in natural language processing and machine translation. Also in this case, the transformer model achieves very good performances, often superior to those of the latest state of the art object detection and localization models YOLOv8 and YOLOv9.
Measuring the Recyclability of Electronic Components to Assist Automatic Disassembly and Sorting Waste Printed Circuit Boards
Jun 24, 2024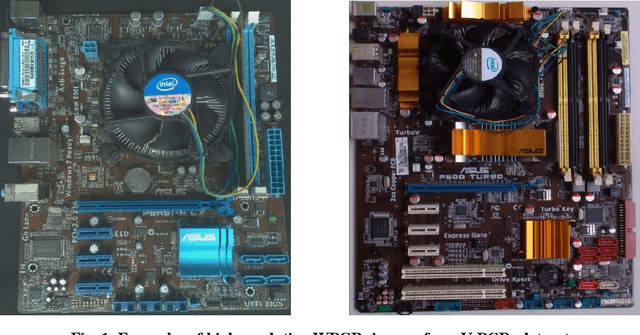
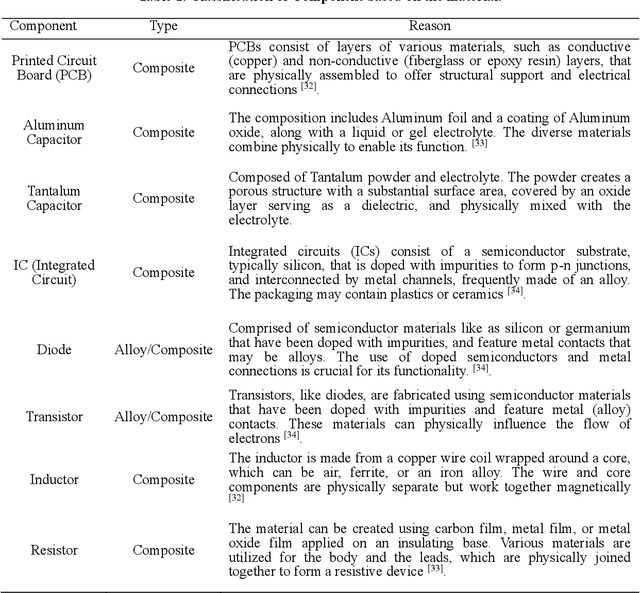
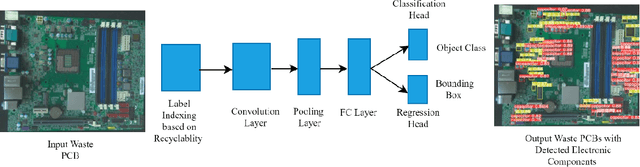
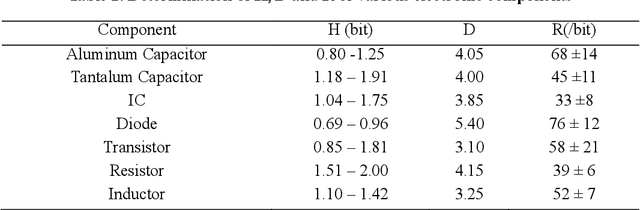
The waste of electrical and electronic equipment has been increased due to the fast evolution of technology products and competition of many IT sectors. Every year millions of tons of electronic waste are thrown into the environment which causes high consequences for human health. Therefore, it is crucial to control this waste flow using technology, especially using Artificial Intelligence but also reclamation of critical raw materials for new production processes. In this paper, we focused on the measurement of recyclability of waste electronic components (WECs) from waste printed circuit boards (WPCBs) using mathematical innovation model. This innovative approach evaluates both the recyclability and recycling difficulties of WECs, integrating an AI model for improved disassembly and sorting. Assessing the recyclability of individual electronic components present on WPCBs provides insight into the recovery potential of valuable materials and indicates the level of complexity involved in recycling in terms of economic worth and production utility. This novel measurement approach helps AI models in accurately determining the number of classes to be identified and sorted during the automated disassembly of discarded PCBs. It also facilitates the model in iterative training and validation of individual electronic components.
Virtual Mines -- Component-level recycling of printed circuit boards using deep learning
Jun 24, 2024This contribution gives an overview of an ongoing project using machine learning and computer vision components for improving the electronic waste recycling process. In circular economy, the "virtual mines" concept refers to production cycles where interesting raw materials are reclaimed in an efficient and cost-effective manner from end-of-life items. In particular, the growth of e-waste, due to the increasingly shorter life cycle of hi-tech goods, is a global problem. In this paper, we describe a pipeline based on deep learning model to recycle printed circuit boards at the component level. A pre-trained YOLOv5 model is used to analyze the results of the locally developed dataset. With a different distribution of class instances, YOLOv5 managed to achieve satisfactory precision and recall, with the ability to optimize with large component instances.
Deep Radiomics for Brain Tumor Detection and Classification from Multi-Sequence MRI
Mar 21, 2019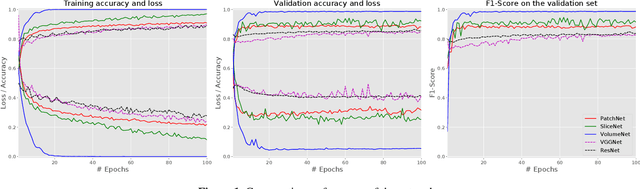
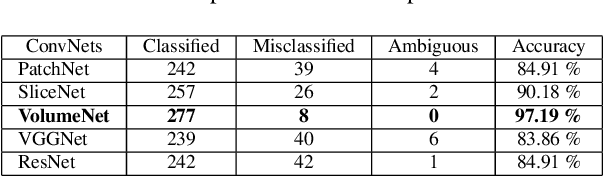
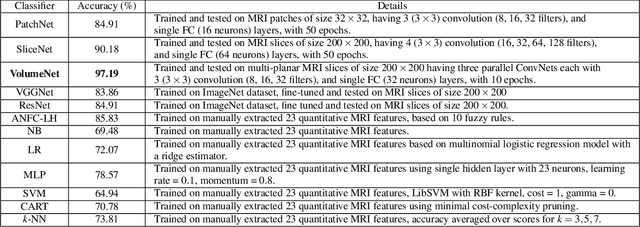
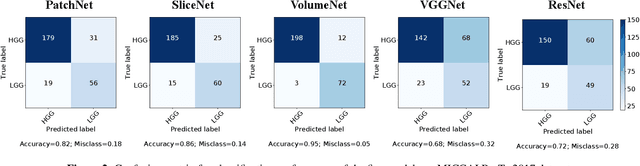
Glioma constitutes 80% of malignant primary brain tumors and is usually classified as HGG and LGG. The LGG tumors are less aggressive, with slower growth rate as compared to HGG, and are responsive to therapy. Tumor biopsy being challenging for brain tumor patients, noninvasive imaging techniques like Magnetic Resonance Imaging (MRI) have been extensively employed in diagnosing brain tumors. Therefore automated systems for the detection and prediction of the grade of tumors based on MRI data becomes necessary for assisting doctors in the framework of augmented intelligence. In this paper, we thoroughly investigate the power of Deep ConvNets for classification of brain tumors using multi-sequence MR images. We propose novel ConvNet models, which are trained from scratch, on MRI patches, slices, and multi-planar volumetric slices. The suitability of transfer learning for the task is next studied by applying two existing ConvNets models (VGGNet and ResNet) trained on ImageNet dataset, through fine-tuning of the last few layers. LOPO testing, and testing on the holdout dataset are used to evaluate the performance of the ConvNets. Results demonstrate that the proposed ConvNets achieve better accuracy in all cases where the model is trained on the multi-planar volumetric dataset. Unlike conventional models, it obtains a testing accuracy of 95% for the low/high grade glioma classification problem. A score of 97% is generated for classification of LGG with/without 1p/19q codeletion, without any additional effort towards extraction and selection of features. We study the properties of self-learned kernels/ filters in different layers, through visualization of the intermediate layer outputs. We also compare the results with that of state-of-the-art methods, demonstrating a maximum improvement of 7% on the grading performance of ConvNets and 9% on the prediction of 1p/19q codeletion status.
A 2D laser rangefinder scans dataset of standard EUR pallets
Mar 13, 2019
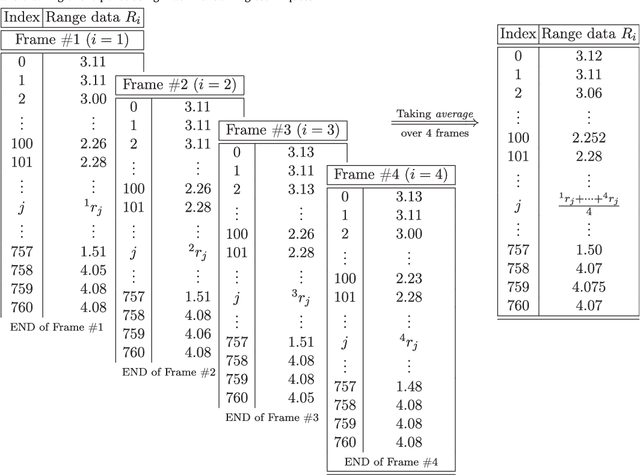
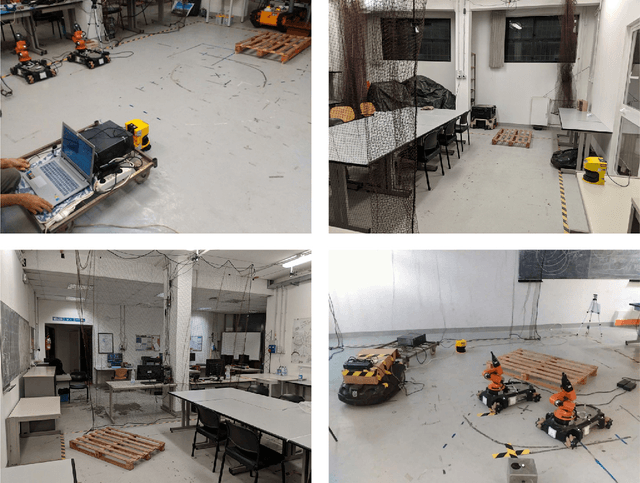
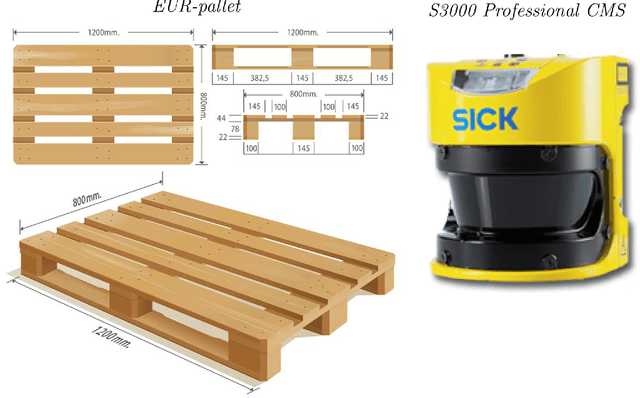
In the past few years, the technology of automated guided vehicles (AGVs) has notably advanced. In particular, in the context of factory and warehouse automation, different approaches have been presented for detecting and localizing pallets inside warehouses and shop-floor environments. In a related research paper [1], we show that an AGVs can detect, localize, and track pallets using machine learning techniques based only on the data of an on-board 2D laser rangefinder. Such sensor is very common in industrial scenarios due to its simplicity and robustness, but it can only provide a limited amount of data. Therefore, it has been neglected in the past in favor of more complex solutions. In this paper, we release to the community the data we collected in [1] for further research activities in the field of pallet localization and tracking. The dataset comprises a collection of 565 2D scans from real-world environments, which are divided into 340 samples where pallets are present, and 225 samples where they are not. The data have been manually labelled and are provided in different formats.
A Neural-Network-Based Model Predictive Control of Three-Phase Inverter With an Output LC Filter
Feb 22, 2019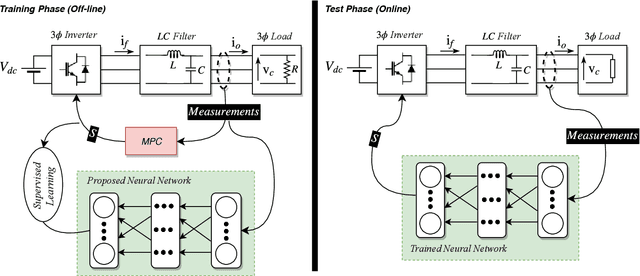
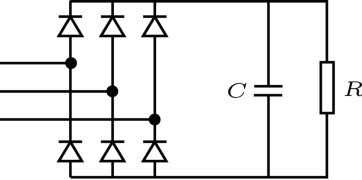
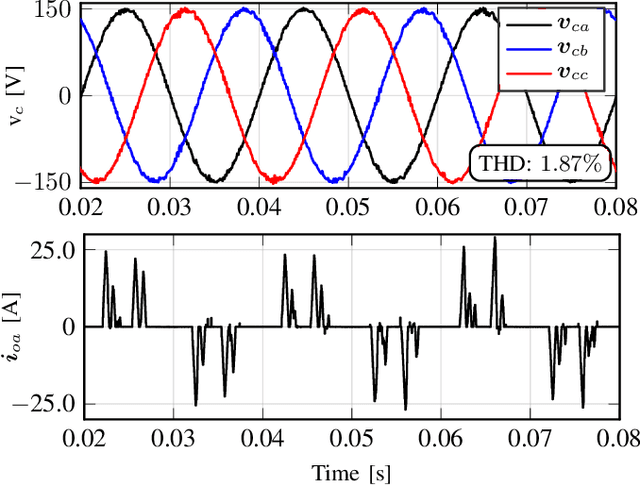
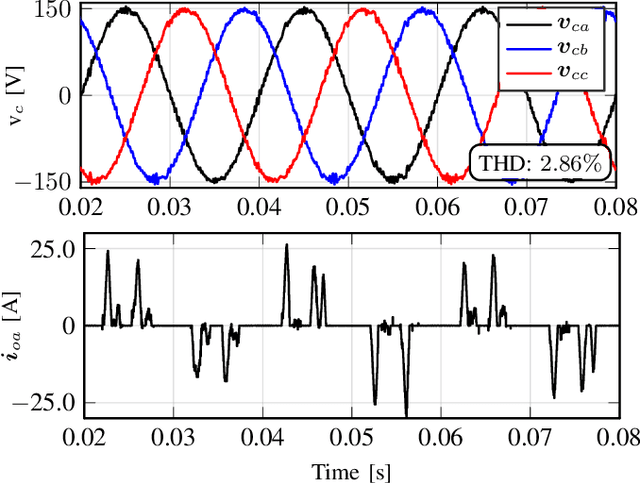
Model predictive control (MPC) has become one of the well-established modern control methods for three-phase inverters with an output LC filter, where a high-quality voltage with low total harmonic distortion (THD) is needed. Though it is an intuitive controller easy to understand and implement, it has the significant disadvantage of requiring a large number of online calculations for solving the optimization problem. On the other hand, the application of model-free approaches such as artificial neural network-based (ANN-based) approaches is currently growing rapidly in the area of power electronics and drives. This paper presents a new control scheme for a two-level converter based on combining MPC with feed-forward ANN, with the aim of getting lower THD and improving the steady and dynamic performance of the system for different types of loads. First, MPC is used, as an expert, in the training phase to generate data required for training the proposed neural network. Then, once the neural network is fine-tuned, it can be successfully used online for voltage tracking purpose, without the need of using MPC. The proposed ANN-based control strategy is validated through simulation, using MATLAB/Simulink tools, taking into account different loads conditions. Moreover, the performance of the ANN-based controller is evaluated, on several samples of linear and non-linear loads under various operating conditions, and compared to that of MPC, demonstrating the excellent steady-state and dynamic performance of the proposed ANN-based control strategy.
Detection, localisation and tracking of pallets using machine learning techniques and 2D range data
Feb 22, 2019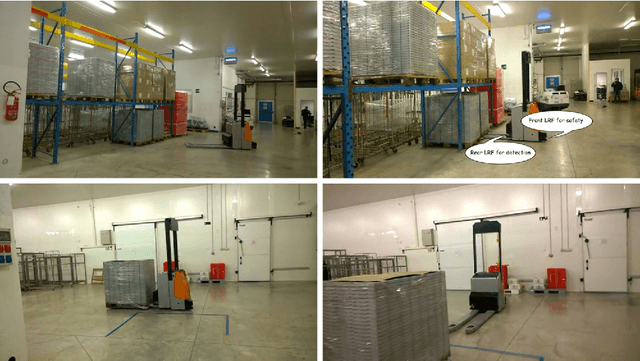
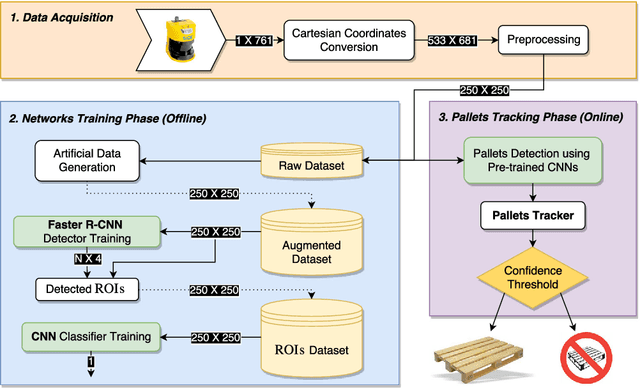
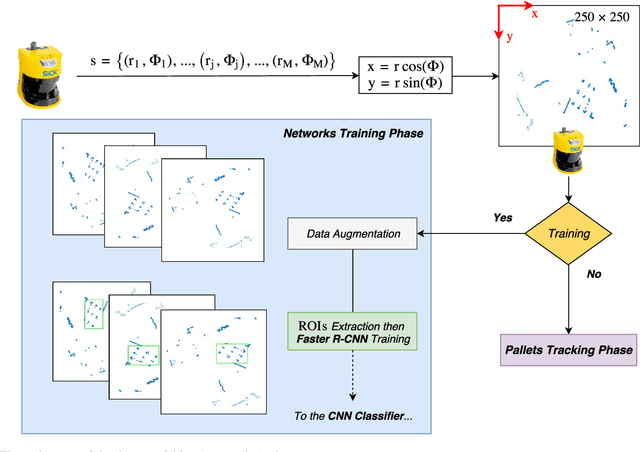
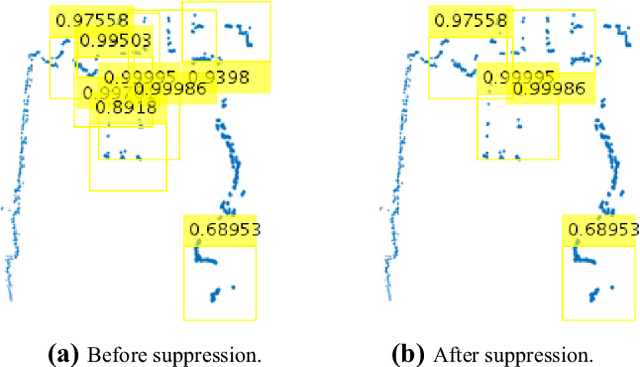
The problem of autonomous transportation in industrial scenarios is receiving a renewed interest due to the way it can revolutionise internal logistics, especially in unstructured environments. This paper presents a novel architecture allowing a robot to detect, localise, and track (possibly multiple) pallets using machine learning techniques based on an on-board 2D laser rangefinder only. The architecture is composed of two main components: the first stage is a pallet detector employing a Faster Region-based Convolutional Neural Network (Faster R-CNN) detector cascaded with a CNN-based classifier; the second stage is a Kalman filter for localising and tracking detected pallets, which we also use to defer commitment to a pallet detected in the first stage until sufficient confidence has been acquired via a sequential data acquisition process. For fine-tuning the CNNs, the architecture has been systematically evaluated using a real-world dataset containing 340 labeled 2D scans, which have been made freely available in an online repository. Detection performance has been assessed on the basis of the average accuracy over k-fold cross-validation, and it scored 99.58% in our tests. Concerning pallet localisation and tracking, experiments have been performed in a scenario where the robot is approaching the pallet to fork. Although data have been originally acquired by considering only one pallet as per specification of the use case we consider, artificial data have been generated as well to mimic the presence of multiple pallets in the robot workspace. Our experimental results confirm that the system is capable of identifying, localising and tracking pallets with a high success rate while being robust to false positives.