 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChance-Constrained Sampling-Based MPC for Collision Avoidance in Uncertain Dynamic Environments
Paper and Code
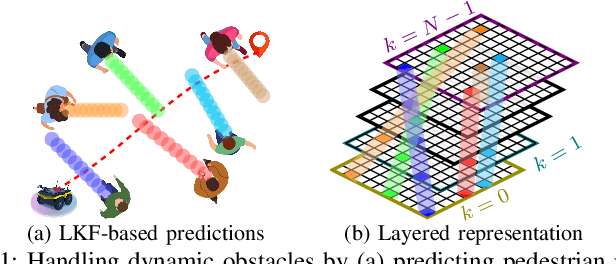


Navigating safely in dynamic and uncertain environments is challenging due to uncertainties in perception and motion. This letter presents C2U-MPPI, a robust sampling-based Model Predictive Control (MPC) framework that addresses these challenges by leveraging the Unscented Model Predictive Path Integral (U-MPPI) control strategy with integrated probabilistic chance constraints, ensuring more reliable and efficient navigation under uncertainty. Unlike gradient-based MPC methods, our approach (i) avoids linearization of system dynamics and directly applies non-convex and nonlinear chance constraints, enabling more accurate and flexible optimization, and (ii) enhances computational efficiency by reformulating probabilistic constraints into a deterministic form and employing a layered dynamic obstacle representation, enabling real-time handling of multiple obstacles. Extensive experiments in simulated and real-world human-shared environments validate the effectiveness of our algorithm against baseline methods, showcasing its capability to generate feasible trajectories and control inputs that adhere to system dynamics and constraints in dynamic settings, enabled by unscented-based sampling strategy and risk-sensitive trajectory evaluation. A supplementary video is available at: https://youtu.be/FptAhvJlQm8