 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausal Inference for De-biasing Motion Estimation from Robotic Observational Data
Paper and Code
Oct 17, 2022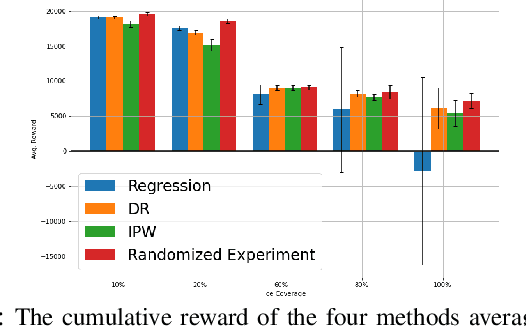
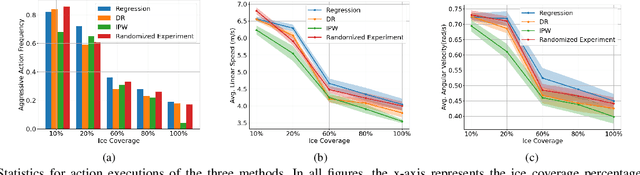
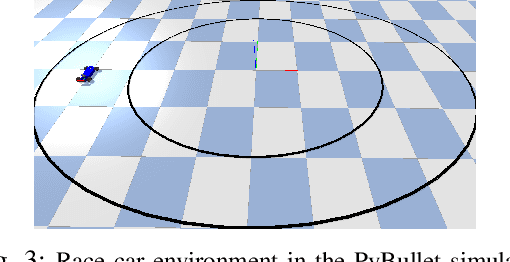
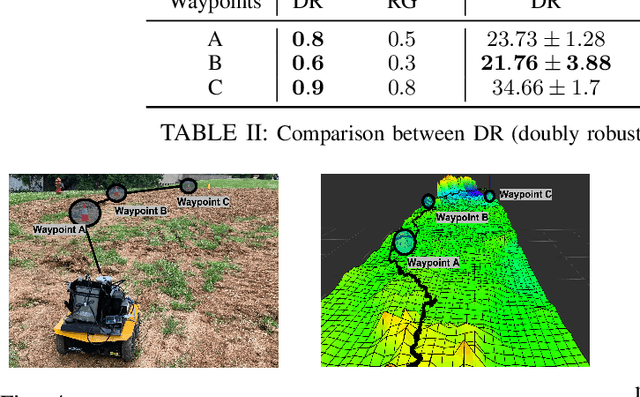
Robot data collected in complex real-world scenarios are often biased due to safety concerns, human preferences, and mission or platform constraints. Consequently, robot learning from such observational data poses great challenges for accurate parameter estimation. We propose a principled causal inference framework for robots to learn the parameters of a stochastic motion model using observational data. Specifically, we leverage the de-biasing functionality of the potential-outcome causal inference framework, the Inverse Propensity Weighting (IPW), and the Doubly Robust (DR) methods, to obtain a better parameter estimation of the robot's stochastic motion model. The IPW is a re-weighting approach to ensure unbiased estimation, and the DR approach further combines any two estimators to strengthen the unbiased result even if one of these estimators is biased. We then develop an approximate policy iteration algorithm using the bias-eliminated estimated state transition function. We validate our framework using both simulation and real-world experiments, and the results have revealed that the proposed causal inference-based navigation and control framework can correctly and efficiently learn the parameters from biased observational data.