 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTaxonomy of A Decision Support System for Adaptive Experimental Design in Field Robotics
Oct 15, 2022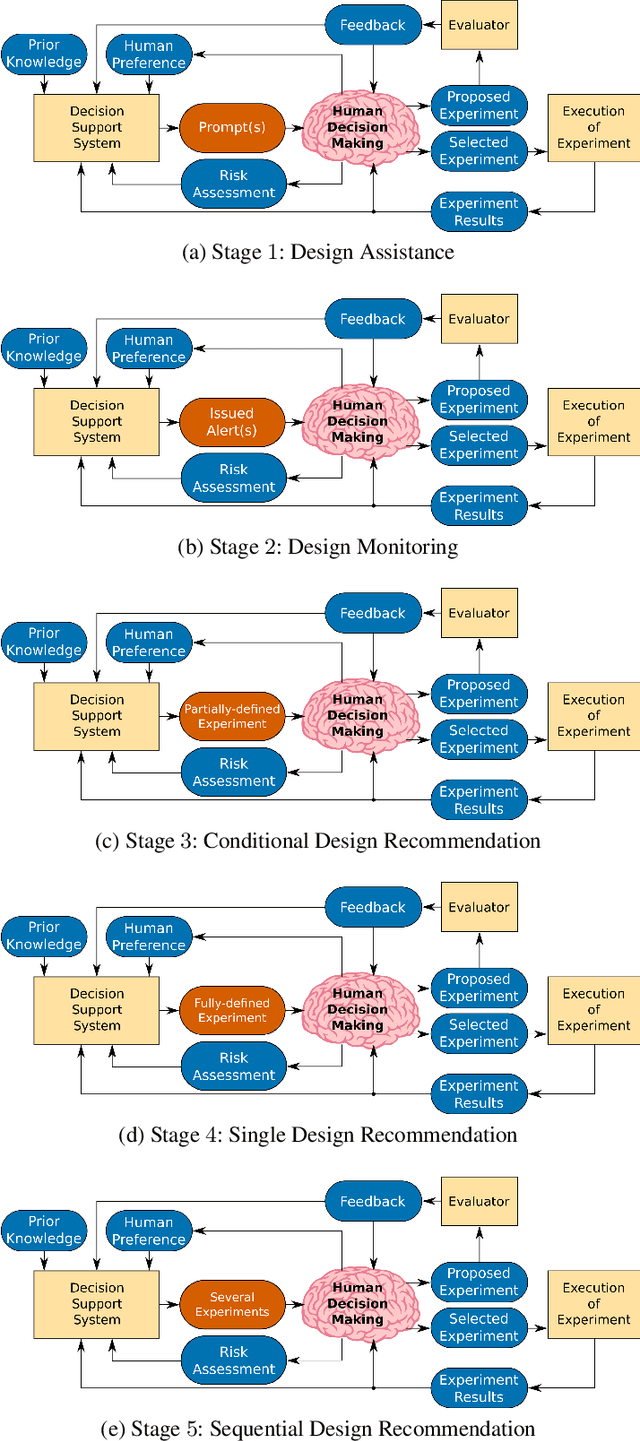
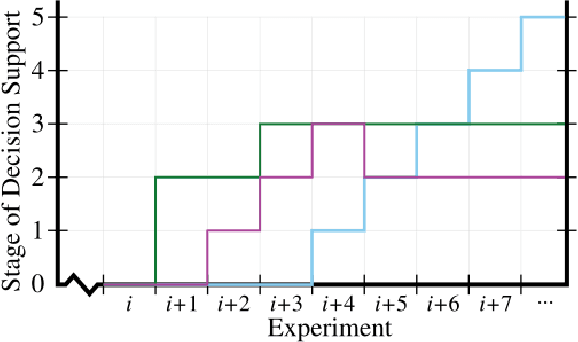
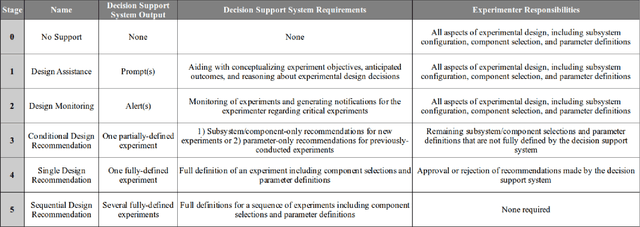
Experimental design in field robotics is an adaptive human-in-the-loop decision-making process in which an experimenter learns about system performance and limitations through interactions with a robot in the form of constructed experiments. This can be challenging because of system complexity, the need to operate in unstructured environments, and the competing objectives of maximizing information gain while simultaneously minimizing experimental costs. Based on the successes in other domains, we propose the use of a Decision Support System (DSS) to amplify the human's decision-making abilities, overcome their inherent shortcomings, and enable principled decision-making in field experiments. In this work, we propose common terminology and a six-stage taxonomy of DSSs specifically for adaptive experimental design of more informative tests and reduced experimental costs. We construct and present our taxonomy using examples and trends from DSS literature, including works involving artificial intelligence and Intelligent DSSs. Finally, we identify critical technical gaps and opportunities for future research to direct the scientific community in the pursuit of next-generation DSSs for experimental design.
Human-Supervised Semi-Autonomous Mobile Manipulators for Safely and Efficiently Executing Machine Tending Tasks
Oct 16, 2020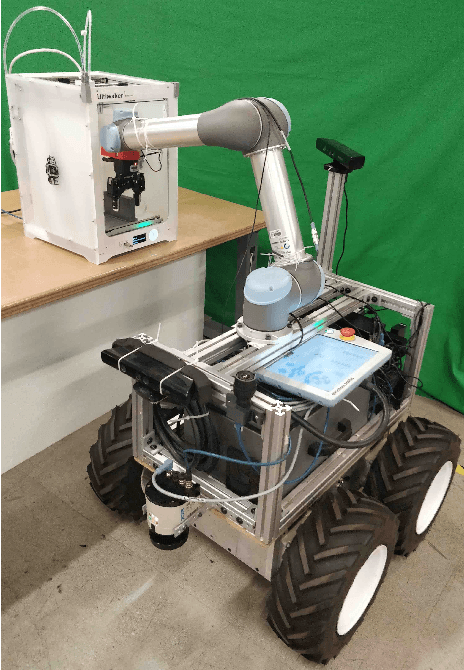
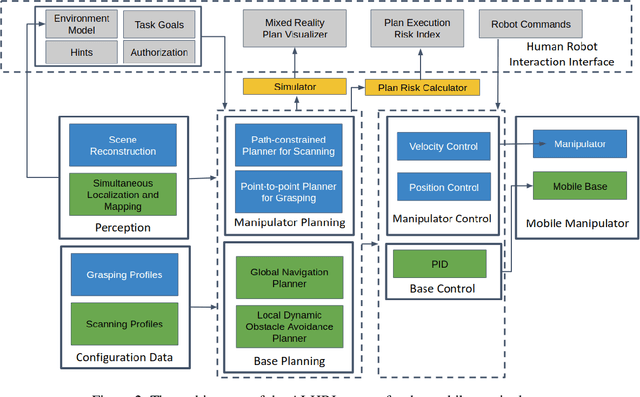
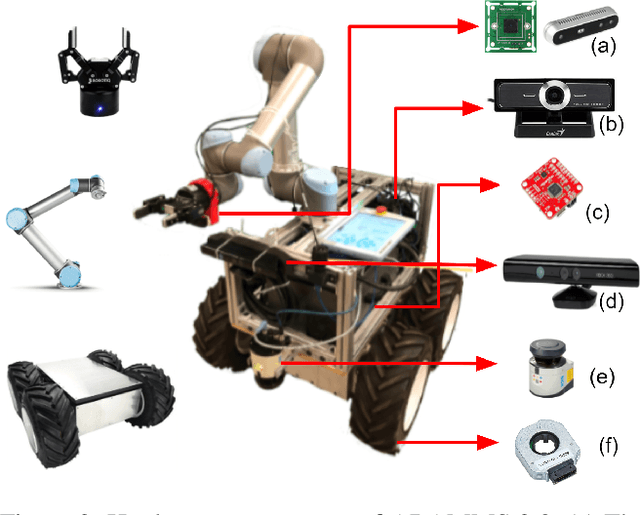
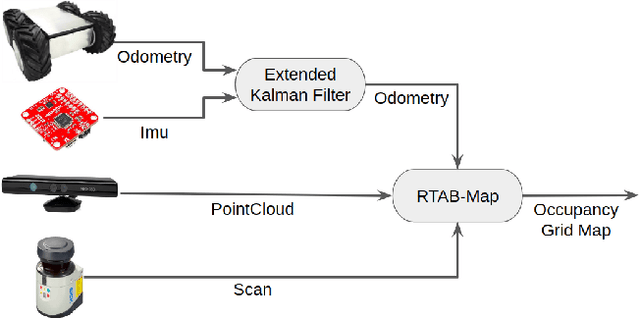
Mobile manipulators can be used for machine tending and material handling tasks in small volume manufacturing applications. These applications usually have semi-structured work environment. The use of a fully autonomous mobile manipulator for such applications can be risky, as an inaccurate model of the workspace may result in damage to expensive equipment. On the other hand, the use of a fully teleoperated mobile manipulator may require a significant amount of operator time. In this paper, a semi-autonomous mobile manipulator is developed for safely and efficiently carrying out machine tending tasks under human supervision. The robot is capable of generating motion plans from the high-level task description and presenting simulation results to the human for approval. The human operator can authorize the robot to execute the automatically generated plan or provide additional input to the planner to refine the plan. If the level of uncertainty in some parts of the workspace model is high, then the human can decide to perform teleoperation to safely execute the task. Our preliminary user trials show that non-expert operators can quickly learn to use the system and perform machine tending tasks.
An Alert-Generation Framework for Improving Resiliency in Human-Supervised, Multi-Agent Teams
Sep 13, 2019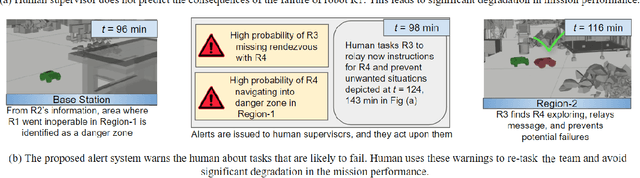
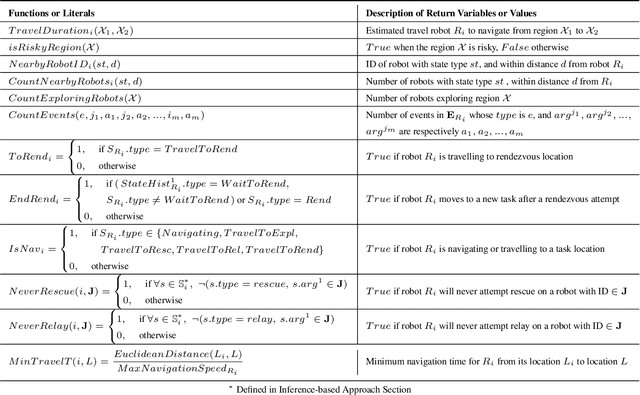
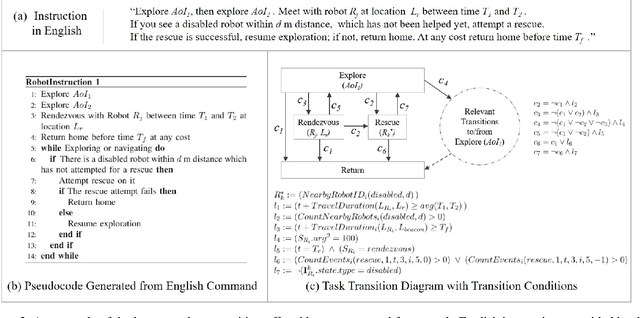

Human-supervision in multi-agent teams is a critical requirement to ensure that the decision-maker's risk preferences are utilized to assign tasks to robots. In stressful complex missions that pose risk to human health and life, such as humanitarian-assistance and disaster-relief missions, human mistakes or delays in tasking robots can adversely affect the mission. To assist human decision making in such missions, we present an alert-generation framework capable of detecting various modes of potential failure or performance degradation. We demonstrate that our framework, based on state machine simulation and formal methods, offers probabilistic modeling to estimate the likelihood of unfavorable events. We introduce smart simulation that offers a computationally-efficient way of detecting low-probability situations compared to standard Monte-Carlo simulations. Moreover, for certain class of problems, our inference-based method can provide guarantees on correctly detecting task failures.