 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid variable spiking graph neural networks for energy-efficient scientific machine learning
Dec 12, 2024Graph-based representations for samples of computational mechanics-related datasets can prove instrumental when dealing with problems like irregular domains or molecular structures of materials, etc. To effectively analyze and process such datasets, deep learning offers Graph Neural Networks (GNNs) that utilize techniques like message-passing within their architecture. The issue, however, is that as the individual graph scales and/ or GNN architecture becomes increasingly complex, the increased energy budget of the overall deep learning model makes it unsustainable and restricts its applications in applications like edge computing. To overcome this, we propose in this paper Hybrid Variable Spiking Graph Neural Networks (HVS-GNNs) that utilize Variable Spiking Neurons (VSNs) within their architecture to promote sparse communication and hence reduce the overall energy budget. VSNs, while promoting sparse event-driven computations, also perform well for regression tasks, which are often encountered in computational mechanics applications and are the main target of this paper. Three examples dealing with prediction of mechanical properties of material based on microscale/ mesoscale structures are shown to test the performance of the proposed HVS-GNNs in regression tasks. We have also compared the performance of HVS-GNN architectures with the performance of vanilla GNNs and GNNs utilizing leaky integrate and fire neurons. The results produced show that HVS-GNNs perform well for regression tasks, all while promoting sparse communication and, hence, energy efficiency.
On Fulfilling the Exigent Need for Automating and Modernizing Logistics Infrastructure in India: Enabling AI-based Integration, Digitalization, and Smart Automation of Industrial Parks and Robotic Warehouses
Oct 02, 2023To stay competitive, the Low- or Middle-Income Countries (LMICs) need to embrace Industry 4.0 and Logistics 4.0. This requires government-level interventions and policy-making to incentivize quality product solutions and drive innovation in traditionally resistant economic sectors. In this position paper, we support the establishment of Smart Industrial Parks (SIPs) with a focus on enhancing operational efficiencies and bringing together MSMEs and startups targeting niche clientele with innovative Industry 4.0 solutions. SIPs along with the phased deployment of well-planned robotic automation technologies shall enable bringing down India's untenable logistics costs. Toward the successful execution of SIPs, we are required to implement the efficient allocation of manufacturing resources and capabilities within SIPs. Thus, we emphasize the importance of efficient resource utilization, collaboration, and technology adoption in industrial parks to promote industrial development and economic growth. We advocate the use of a cloud-based cyber-physical system for real-time data access and analysis in SIPs. Such centralized cloud-based monitoring of factory floors, warehouses, and industrial units using IoT infrastructure shall improve decision-making, efficiency, and safety. Digital Twins (DTs), which are cyber-replicas of physical systems, could play a significant role in enabling simulation, optimization, and real-time monitoring of smart manufacturing and distributed manufacturing systems. However, there are several challenges involved in implementing DTs in distributed manufacturing systems, such as defining data schemas and collaboration protocols, ensuring interoperability, the need for effective authentication technology, distributed machine learning models, and scalability to manage multiple DTs.
An Alert-Generation Framework for Improving Resiliency in Human-Supervised, Multi-Agent Teams
Sep 13, 2019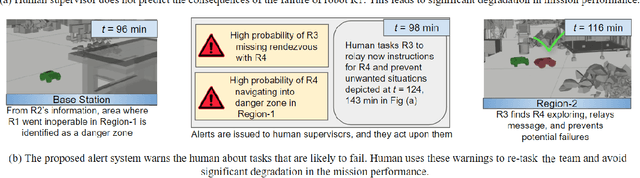

Human-supervision in multi-agent teams is a critical requirement to ensure that the decision-maker's risk preferences are utilized to assign tasks to robots. In stressful complex missions that pose risk to human health and life, such as humanitarian-assistance and disaster-relief missions, human mistakes or delays in tasking robots can adversely affect the mission. To assist human decision making in such missions, we present an alert-generation framework capable of detecting various modes of potential failure or performance degradation. We demonstrate that our framework, based on state machine simulation and formal methods, offers probabilistic modeling to estimate the likelihood of unfavorable events. We introduce smart simulation that offers a computationally-efficient way of detecting low-probability situations compared to standard Monte-Carlo simulations. Moreover, for certain class of problems, our inference-based method can provide guarantees on correctly detecting task failures.