 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Supervised Semi-Autonomous Mobile Manipulators for Safely and Efficiently Executing Machine Tending Tasks
Oct 16, 2020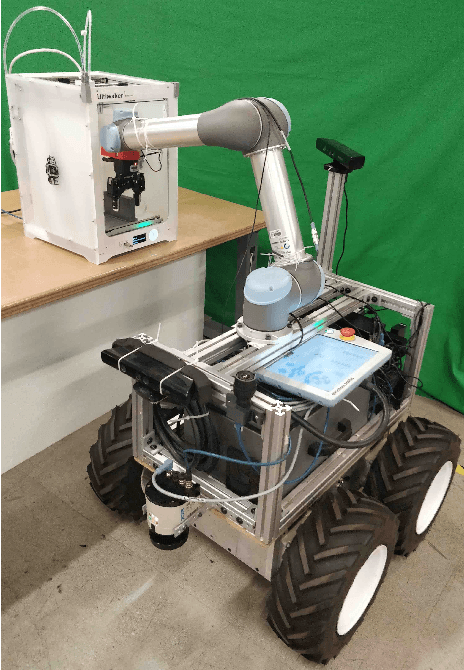
Mobile manipulators can be used for machine tending and material handling tasks in small volume manufacturing applications. These applications usually have semi-structured work environment. The use of a fully autonomous mobile manipulator for such applications can be risky, as an inaccurate model of the workspace may result in damage to expensive equipment. On the other hand, the use of a fully teleoperated mobile manipulator may require a significant amount of operator time. In this paper, a semi-autonomous mobile manipulator is developed for safely and efficiently carrying out machine tending tasks under human supervision. The robot is capable of generating motion plans from the high-level task description and presenting simulation results to the human for approval. The human operator can authorize the robot to execute the automatically generated plan or provide additional input to the planner to refine the plan. If the level of uncertainty in some parts of the workspace model is high, then the human can decide to perform teleoperation to safely execute the task. Our preliminary user trials show that non-expert operators can quickly learn to use the system and perform machine tending tasks.