 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotionDisco: Motion Discovery for Extreme Humanoid Loco-Manipulation
Jun 04, 2026We present MotionDisco, a framework that discovers contact-rich, long-horizon humanoid loco-manipulation motions from scratch, without relying on teleoperation or motion retargeting from human demonstrations. This is challenging because the space of possible contact interactions grows combinatorially with the task horizon and the number of objects in the scene. MotionDisco enables rapid discovery of novel motions by coupling a large language model (LLM) guided evolutionary search over sequences of interactions with an efficient sequential kinodynamic trajectory optimizer and pruning strategy, enabling the rapid discovery of novel skills. Through extensive ablation studies, we show that our LLM-guided search discovers successful whole-body trajectories across several challenging long-horizon tasks. Finally, by training reinforcement learning tracking policies on the discovered trajectories, we transfer the motions to a real humanoid robot. This is the first work to discover and deploy long-horizon humanoid loco-manipulation skills entirely through automated evolutionary search. Supplementary videos of the experiments are available at: https://youtu.be/DHiVz34QYlw.
Allometric Scaling Laws for Bipedal Robots
Mar 23, 2026Scaling the design of robots up or down remains a fundamental challenge. While biological systems follow well-established isometric and allometric scaling laws relating mass, stride frequency, velocity, and torque, it is unclear how these relationships translate to robotic systems. In this paper, we generate similar allometric scaling laws for bipedal robots across three orders of magnitude in leg length. First, we conduct a review of legged robots from the literature and extract empirical relationships between leg length (L), body length, mass, and speed. These data show that robot mass scales more closely to L^2, in contrast to the L^3 scaling predicted by isometric scaling. We then perform controlled simulation studies in Drake using three variants of real quasi-passive, hip-actuated walkers with different foot geometries and control strategies. We evaluate the performance of each design scaled with leg length, L. Across all robots, walking velocity follows the expected L^(1/2) trend from dynamic similarity. Minimum required torque scales more closely with m*L than the isometric model of m*L^2. Foot geometry scaled proportionally with L^1. These results provide new insight into how robot designs allometrically scale to different sizes, and how that scaling is different from isometric or biological scaling laws.
SURE: Safe Uncertainty-Aware Robot-Environment Interaction using Trajectory Optimization
Feb 06, 2026Robotic tasks involving contact interactions pose significant challenges for trajectory optimization due to discontinuous dynamics. Conventional formulations typically assume deterministic contact events, which limit robustness and adaptability in real-world settings. In this work, we propose SURE, a robust trajectory optimization framework that explicitly accounts for contact timing uncertainty. By allowing multiple trajectories to branch from possible pre-impact states and later rejoin a shared trajectory, SURE achieves both robustness and computational efficiency within a unified optimization framework. We evaluate SURE on two representative tasks with unknown impact times. In a cart-pole balancing task involving uncertain wall location, SURE achieves an average improvement of 21.6% in success rate when branch switching is enabled during control. In an egg-catching experiment using a robotic manipulator, SURE improves the success rate by 40%. These results demonstrate that SURE substantially enhances robustness compared to conventional nominal formulations.
Zippy: The smallest power-autonomous bipedal robot
May 08, 2025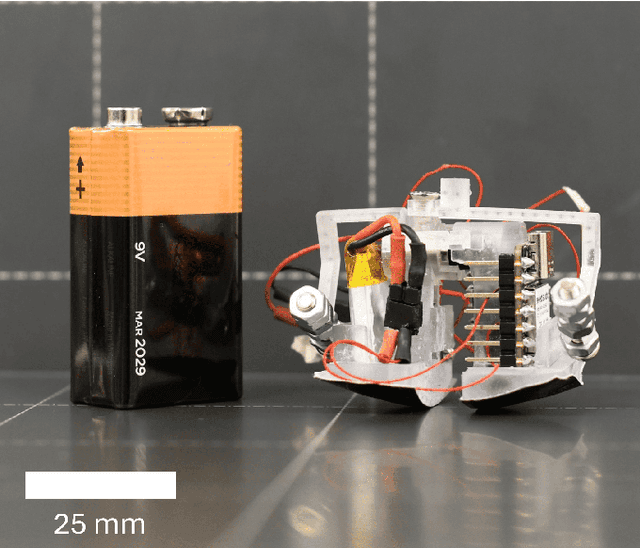
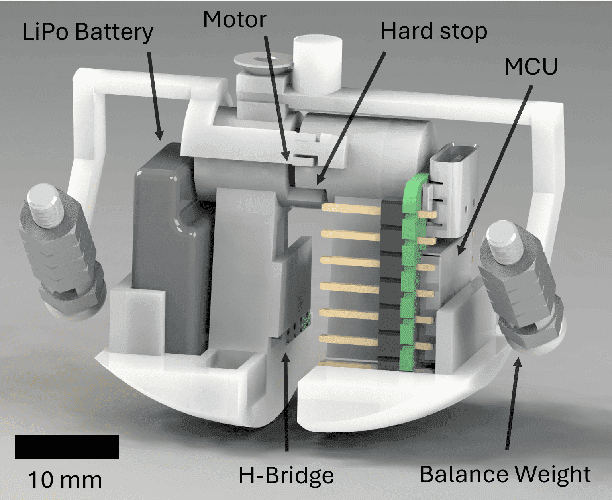
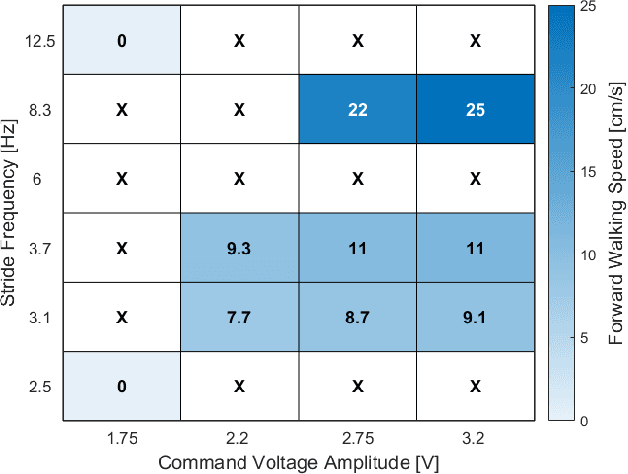
Miniaturizing legged robot platforms is challenging due to hardware limitations that constrain the number, power density, and precision of actuators at that size. By leveraging design principles of quasi-passive walking robots at any scale, stable locomotion and steering can be achieved with simple mechanisms and open-loop control. Here, we present the design and control of "Zippy", the smallest self-contained bipedal walking robot at only 3.6 cm tall. Zippy has rounded feet, a single motor without feedback control, and is capable of turning, skipping, and ascending steps. At its fastest pace, the robot achieves a forward walking speed of 25 cm/s, which is 10 leg lengths per second, the fastest biped robot of any size by that metric. This work explores the design and performance of the robot and compares it to similar dynamic walking robots at larger scales.
Multi-Momentum Observer Contact Estimation for Bipedal Robots
Dec 04, 2024



As bipedal robots become more and more popular in commercial and industrial settings, the ability to control them with a high degree of reliability is critical. To that end, this paper considers how to accurately estimate which feet are currently in contact with the ground so as to avoid improper control actions that could jeopardize the stability of the robot. Additionally, modern algorithms for estimating the position and orientation of a robot's base frame rely heavily on such contact mode estimates. Dedicated contact sensors on the feet can be used to estimate this contact mode, but these sensors are prone to noise, time delays, damage/yielding from repeated impacts with the ground, and are not available on every robot. To overcome these limitations, we propose a momentum observer based method for contact mode estimation that does not rely on such contact sensors. Often, momentum observers assume that the robot's base frame can be treated as an inertial frame. However, since many humanoids' legs represent a significant portion of the overall mass, the proposed method instead utilizes multiple simultaneous dynamic models. Each of these models assumes a different contact condition. A given contact assumption is then used to constrain the full dynamics in order to avoid assuming that either the body is an inertial frame or that a fully accurate estimate of body velocity is known. The (dis)agreement between each model's estimates and measurements is used to determine which contact mode is most likely using a Markov-style fusion method. The proposed method produces contact detection accuracy of up to 98.44% with a low noise simulation and 77.12% when utilizing data collect on the Sarcos Guardian XO robot (a hybrid humanoid/exoskeleton).
SuperLoc: The Key to Robust LiDAR-Inertial Localization Lies in Predicting Alignment Risks
Dec 03, 2024



Map-based LiDAR localization, while widely used in autonomous systems, faces significant challenges in degraded environments due to lacking distinct geometric features. This paper introduces SuperLoc, a robust LiDAR localization package that addresses key limitations in existing methods. SuperLoc features a novel predictive alignment risk assessment technique, enabling early detection and mitigation of potential failures before optimization. This approach significantly improves performance in challenging scenarios such as corridors, tunnels, and caves. Unlike existing degeneracy mitigation algorithms that rely on post-optimization analysis and heuristic thresholds, SuperLoc evaluates the localizability of raw sensor measurements. Experimental results demonstrate significant performance improvements over state-of-the-art methods across various degraded environments. Our approach achieves a 54% increase in accuracy and exhibits the highest robustness. To facilitate further research, we release our implementation along with datasets from eight challenging scenarios
Path Integral Control for Hybrid Dynamical Systems
Nov 01, 2024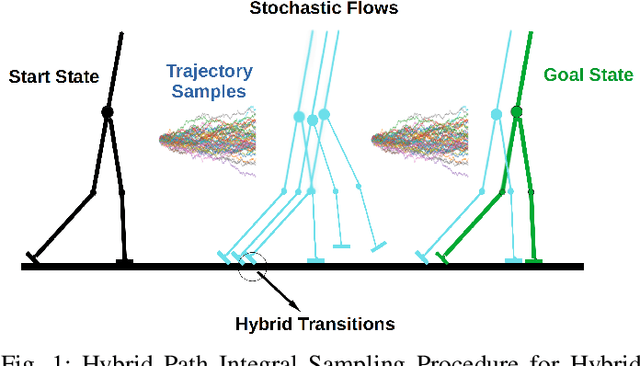
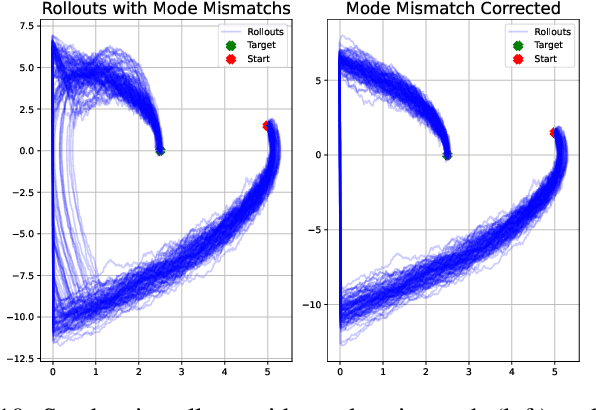
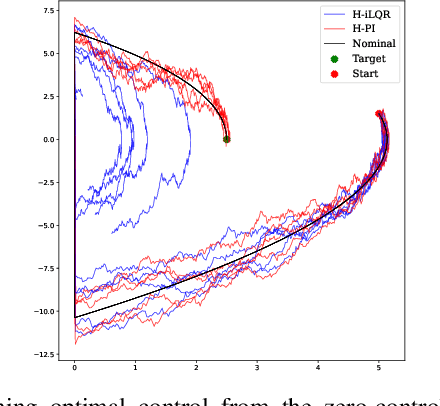
This work introduces a novel paradigm for solving optimal control problems for hybrid dynamical systems under uncertainties. Robotic systems having contact with the environment can be modeled as hybrid systems. Controller design for hybrid systems under disturbances is complicated by the discontinuous jump dynamics, mode changes with inconsistent state dimensions, and variations in jumping timing and states caused by noise. We formulate this problem into a stochastic control problem with hybrid transition constraints and propose the Hybrid Path Integral (H-PI) framework to obtain the optimal controller. Despite random mode changes across stochastic path samples, we show that the ratio between hybrid path distributions with varying drift terms remains analogous to the smooth path distributions. We then show that the optimal controller can be obtained by evaluating a path integral with hybrid constraints. Importance sampling for path distributions with hybrid dynamics constraints is introduced to reduce the variance of the path integral evaluation, where we leverage the recently developed Hybrid iterative-Linear-Quadratic-Regulator (H-iLQR) controller to induce a hybrid path distribution proposal with low variance. The proposed method is validated through numerical experiments on various hybrid systems and extensive ablation studies. All the sampling processes are conducted in parallel on a Graphics Processing Unit (GPU).
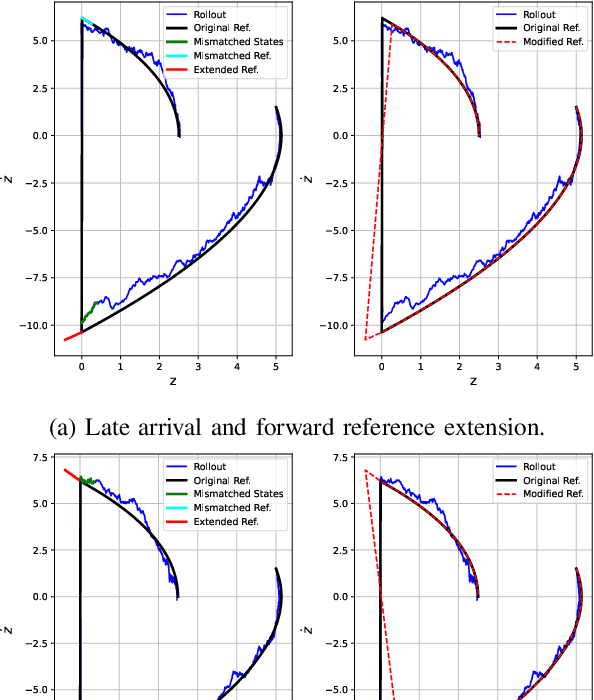
Hybrid Iterative Linear Quadratic Estimation: Optimal Estimation for Hybrid Systems
Oct 25, 2024In this paper we present Hybrid iterative Linear Quadratic Estimation (HiLQE), an optimization based offline state estimation algorithm for hybrid dynamical systems. We utilize the saltation matrix, a first order approximation of the variational update through an event driven hybrid transition, to calculate gradient information through hybrid events in the backward pass of an iterative linear quadratic optimization over state estimates. This enables accurate computation of the value function approximation at each timestep. Additionally, the forward pass in the iterative algorithm is augmented with hybrid dynamics in the rollout. A reference extension method is used to account for varying impact times when comparing states for the feedback gain in noise calculation. The proposed method is demonstrated on an ASLIP hopper system with position measurements. In comparison to the Salted Kalman Filter (SKF), the algorithm presented here achieves a maximum of 63.55% reduction in estimation error magnitude over all state dimensions near impact events.
Double-Anonymous Review for Robotics
Jun 14, 2024Prior research has investigated the benefits and costs of double-anonymous review (DAR, also known as double-blind review) in comparison to single-anonymous review (SAR) and open review (OR). Several review papers have attempted to compile experimental results in peer review research both broadly and in engineering and computer science. This document summarizes prior research in peer review that may inform decisions about the format of peer review in the field of robotics and makes some recommendations for potential next steps for robotics publication.
Pay Attention to How You Drive: Safe and Adaptive Model-Based Reinforcement Learning for Off-Road Driving
Oct 12, 2023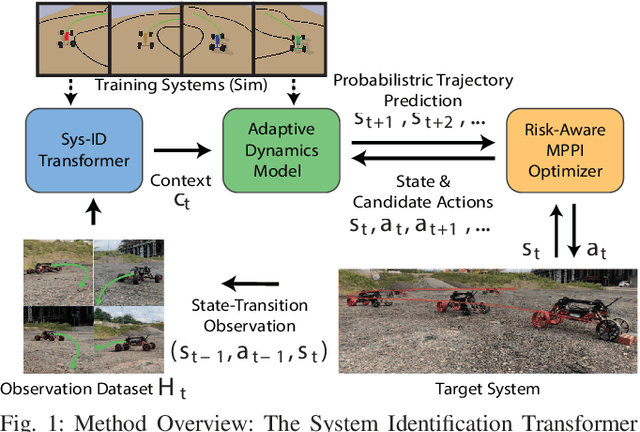
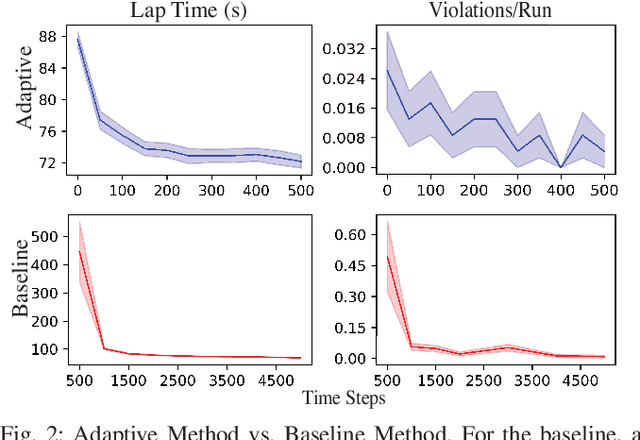
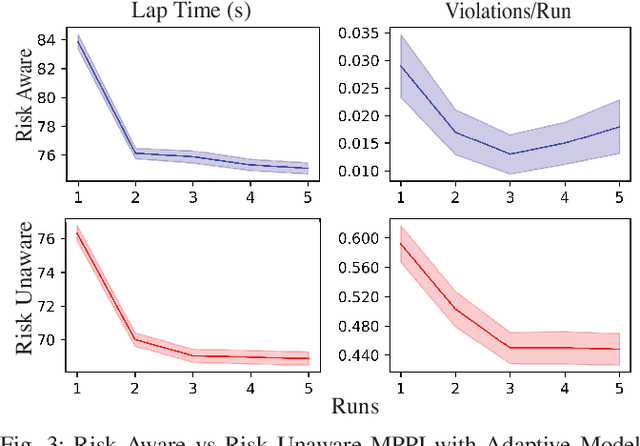
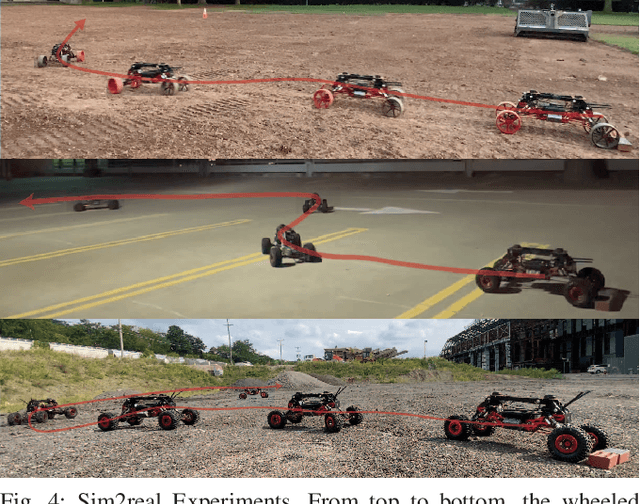
Autonomous off-road driving is challenging as risky actions taken by the robot may lead to catastrophic damage. As such, developing controllers in simulation is often desirable as it provides a safer and more economical alternative. However, accurately modeling robot dynamics is difficult due to the complex robot dynamics and terrain interactions in unstructured environments. Domain randomization addresses this problem by randomizing simulation dynamics parameters, however this approach sacrifices performance for robustness leading to policies that are sub-optimal for any target dynamics. We introduce a novel model-based reinforcement learning approach that aims to balance robustness with adaptability. Our approach trains a System Identification Transformer (SIT) and an Adaptive Dynamics Model (ADM) under a variety of simulated dynamics. The SIT uses attention mechanisms to distill state-transition observations from the target system into a context vector, which provides an abstraction for its target dynamics. Conditioned on this, the ADM probabilistically models the system's dynamics. Online, we use a Risk-Aware Model Predictive Path Integral controller (MPPI) to safely control the robot under its current understanding of the dynamics. We demonstrate in simulation as well as in multiple real-world environments that this approach enables safer behaviors upon initialization and becomes less conservative (i.e. faster) as its understanding of the target system dynamics improves with more observations. In particular, our approach results in an approximately 41% improvement in lap-time over the non-adaptive baseline while remaining safe across different environments.