 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Momentum Observer Contact Estimation for Bipedal Robots
Dec 04, 2024



As bipedal robots become more and more popular in commercial and industrial settings, the ability to control them with a high degree of reliability is critical. To that end, this paper considers how to accurately estimate which feet are currently in contact with the ground so as to avoid improper control actions that could jeopardize the stability of the robot. Additionally, modern algorithms for estimating the position and orientation of a robot's base frame rely heavily on such contact mode estimates. Dedicated contact sensors on the feet can be used to estimate this contact mode, but these sensors are prone to noise, time delays, damage/yielding from repeated impacts with the ground, and are not available on every robot. To overcome these limitations, we propose a momentum observer based method for contact mode estimation that does not rely on such contact sensors. Often, momentum observers assume that the robot's base frame can be treated as an inertial frame. However, since many humanoids' legs represent a significant portion of the overall mass, the proposed method instead utilizes multiple simultaneous dynamic models. Each of these models assumes a different contact condition. A given contact assumption is then used to constrain the full dynamics in order to avoid assuming that either the body is an inertial frame or that a fully accurate estimate of body velocity is known. The (dis)agreement between each model's estimates and measurements is used to determine which contact mode is most likely using a Markov-style fusion method. The proposed method produces contact detection accuracy of up to 98.44% with a low noise simulation and 77.12% when utilizing data collect on the Sarcos Guardian XO robot (a hybrid humanoid/exoskeleton).
Moving past point-contacts: Extending the ALIP model to humanoids with non-trivial feet using hierarchical, full-body momentum control
Aug 09, 2024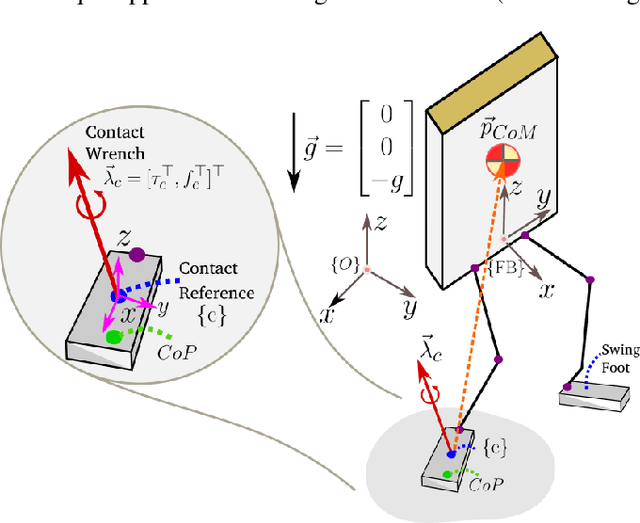
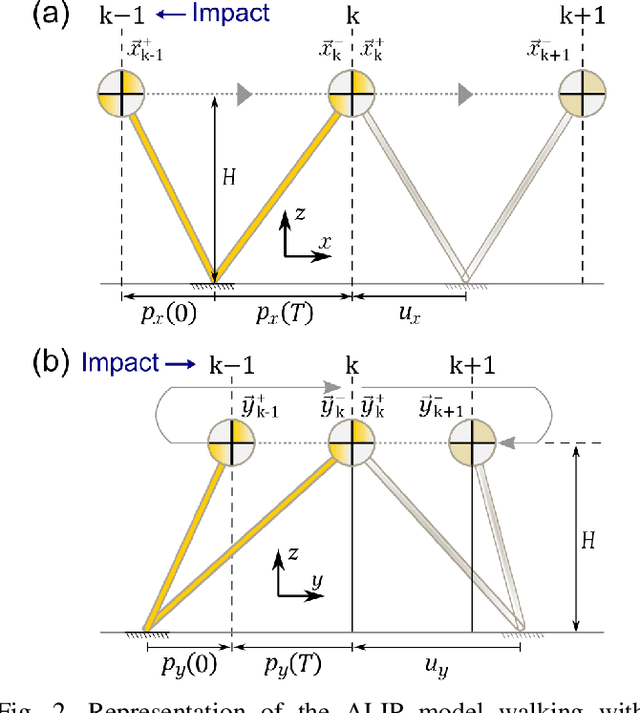
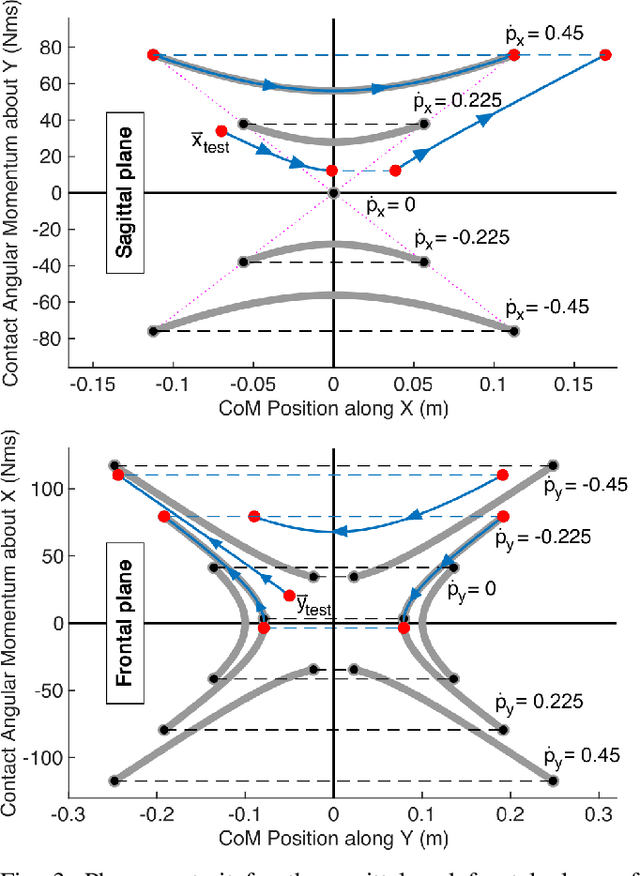
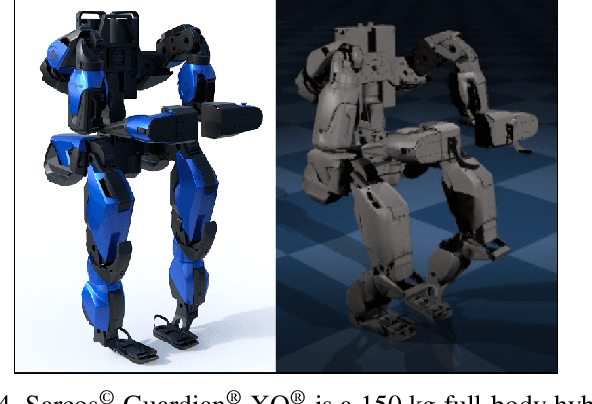
The Angular-Momentum Linear Inverted Pendulum (ALIP) model is a promising motion planner for bipedal robots. However, it relies on two assumptions: (1) the robot has point-contact feet or passive ankles, and (2) the angular momentum around the center of mass, known as centroidal angular momentum, is negligible. This paper addresses the question of whether the ALIP paradigm can be applied to more general bipedal systems with complex foot geometry (e.g., flat feet) and nontrivial torso/limb inertia and mass distribution (e.g., non-centralized arms). In such systems, the dynamics introduce non-negligible centroidal momentum and contact wrenches at the feet, rendering the assumptions of the ALIP model invalid. This paper presents the ALIP planner for general bipedal robots with non-point-contact feet through the use of a task-space whole-body controller that regulates centroidal momentum, thereby ensuring that the robot's behavior aligns with the desired template dynamics. To demonstrate the effectiveness of our proposed approach, we conduct simulations using the Sarcos Guardian XO robot, which is a hybrid humanoid/exoskeleton with large, offset feet. The results demonstrate the practicality and effectiveness of our approach in achieving stable and versatile bipedal locomotion.