 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDouble-Anonymous Review for Robotics
Jun 14, 2024Prior research has investigated the benefits and costs of double-anonymous review (DAR, also known as double-blind review) in comparison to single-anonymous review (SAR) and open review (OR). Several review papers have attempted to compile experimental results in peer review research both broadly and in engineering and computer science. This document summarizes prior research in peer review that may inform decisions about the format of peer review in the field of robotics and makes some recommendations for potential next steps for robotics publication.
Design and Autonomous Stabilization of a Ballistically Launched Multirotor
Nov 22, 2019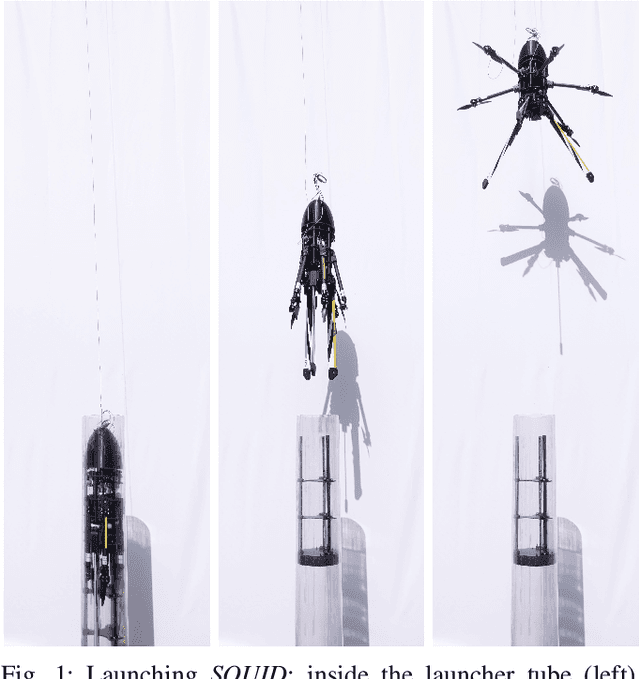
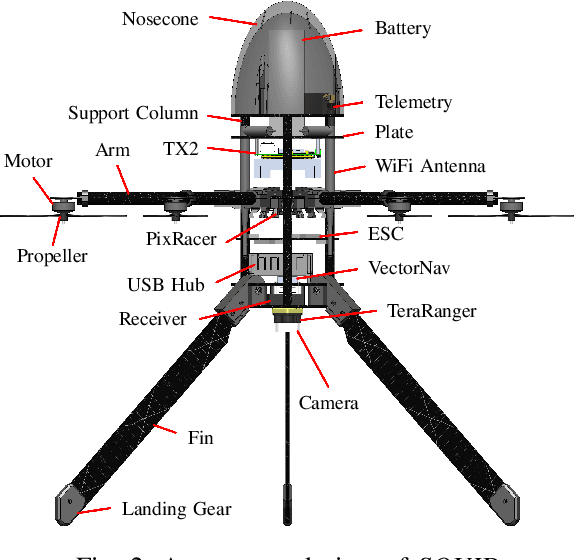
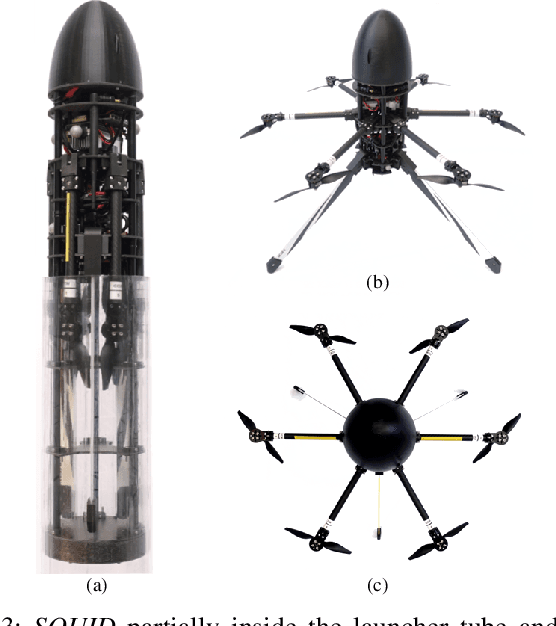
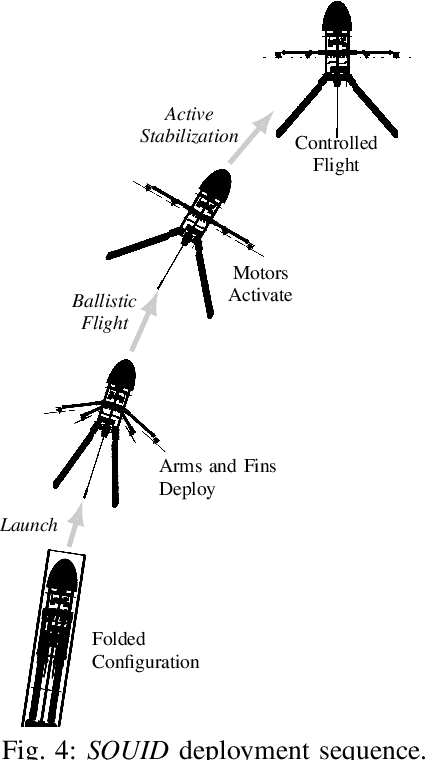
Aircraft that can launch ballistically and then convert to autonomous, free flying drones have applications in many areas, such as emergency response, defense, and space exploration, where they can gather critical situational data using onboard sensors. In previous work, we presented a proof of concept, manually stabilized folding multirotor that deploys from a pressurized tube mounted on a vehicle moving at speeds of up to 50 mph. This paper presents a larger, autonomously stabilizing multirotor prototype with an onboard sensor suite, autonomy pipeline, and improved aerodynamic stability margin. We also demonstrate autonomous transition from passive to active stabilization, confirming the ability of the multirotor to autonomously stabilize after a ballistic launch in a GPS denied environment.