 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDouble-Anonymous Review for Robotics
Jun 14, 2024Prior research has investigated the benefits and costs of double-anonymous review (DAR, also known as double-blind review) in comparison to single-anonymous review (SAR) and open review (OR). Several review papers have attempted to compile experimental results in peer review research both broadly and in engineering and computer science. This document summarizes prior research in peer review that may inform decisions about the format of peer review in the field of robotics and makes some recommendations for potential next steps for robotics publication.
Developing a Simple Model for Sand-Tool Interaction and Autonomously Shaping Sand
Aug 07, 2019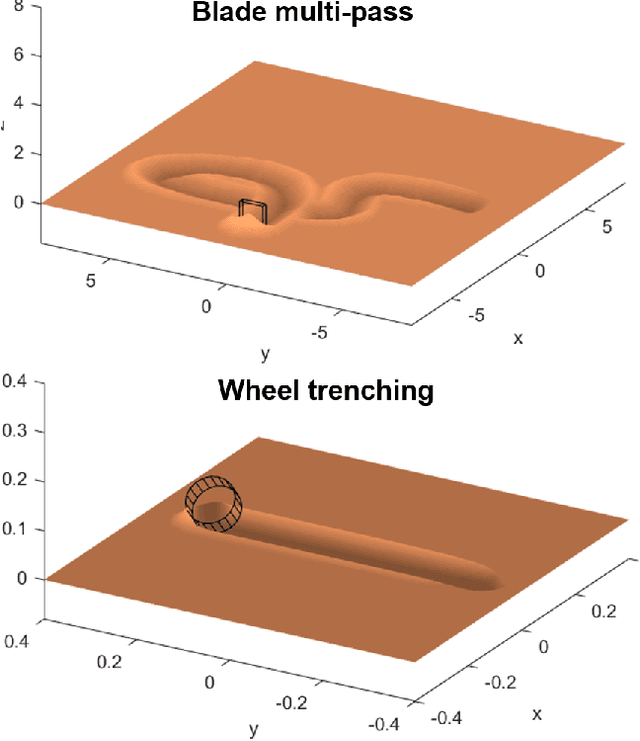
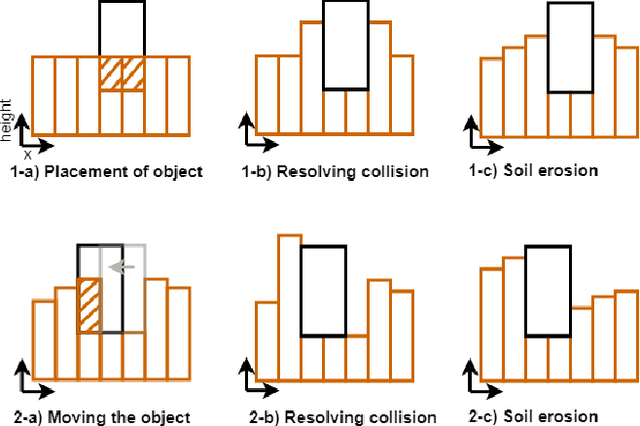
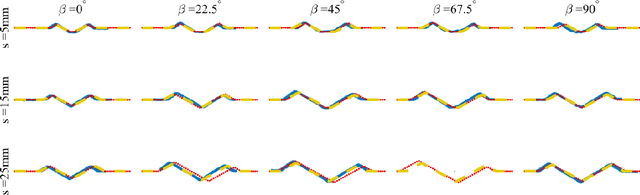
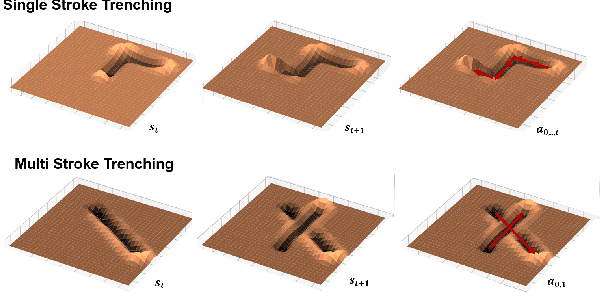
Autonomy for robots interacting with sand will enable a wide range of beneficial behaviors, from earth moving for construction and farming vehicles to navigating rough terrain for Mars rovers. The goal of this work is to shape sand into desired forms. Unlike other common autonomous tasks of achieving desired state of a robot, achieving a desired shape of a continuously deformable environment like sand is a much more challenging task. The state of robot can be described with a couple of states-x, y, z, roll, pitch, yaw-but the desired shape of sand can not be described with just a few values. Sand is an aggregation of billions of small particles. After simplifying the model of sand and tool interaction by looking only at the surface of the heightmap, we can formulate the problems into something that is still high dimensional (hundreds to thousands of state dimensions) but much more solvable. We show how this problem can be formulated into a graph search problem and solve it with the A-star algorithm and report preliminary results on using deep reinforcement learning methods like Deep Q-Network and Deep Deterministic Policy Gradient.
Enhancing the Vertical Mobility of a Robot Hexapod Using Microspines
Jun 11, 2019
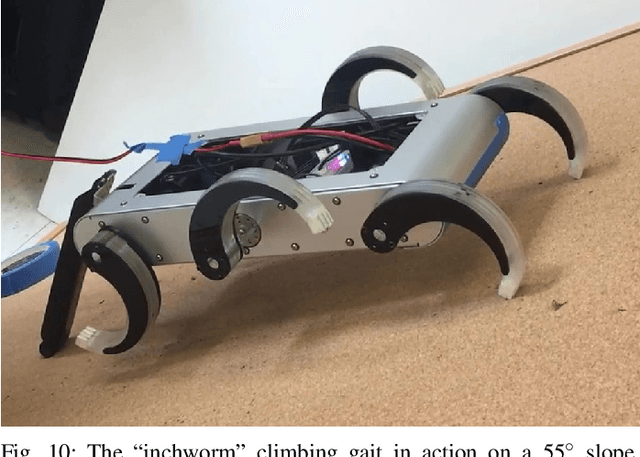
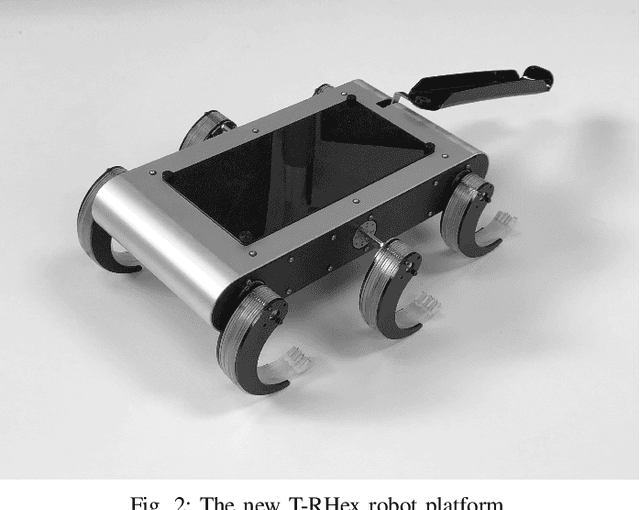
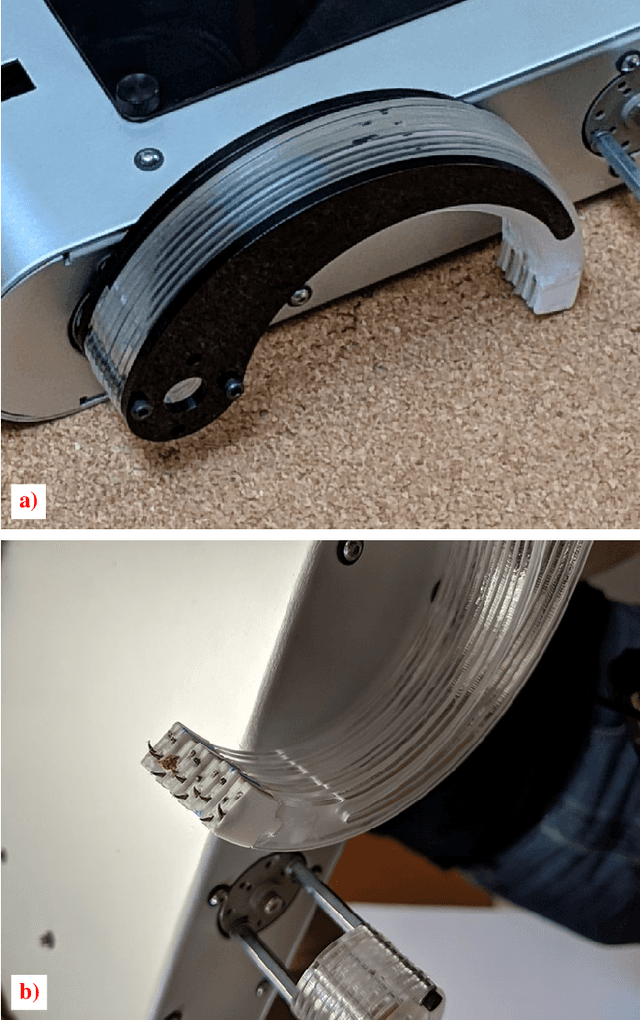
Modern climbing robots have risen to great heights, but mechanisms meant to scale cliffs often locomote slowly and over-cautiously on level ground. Here we introduce T-RHex, an iteration on the classic cockroach-inspired hexapod that has been augmented with microspine feet for climbing. T-RHex is a mechanically intelligent platform capable of efficient locomotion on ground with added climbing abilities. The addition of microspines to the T-RHex platform greatly increased the maximum slope angle the robot was capable of maintaining position on and ascending. T-RHex was able to statically hang on slopes up to 135 degrees from horizontal (45 degree overhang) and ascend slopes up to 55 degrees, without impacting ground mobility. We present our experimental data along with plans for future work along this research path.