 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing the Vertical Mobility of a Robot Hexapod Using Microspines
Jun 11, 2019
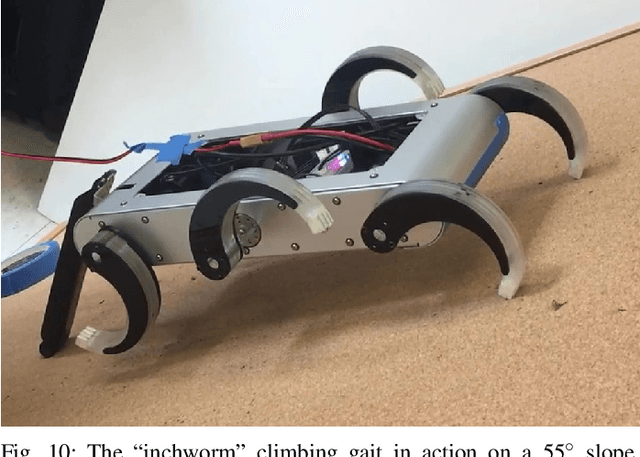
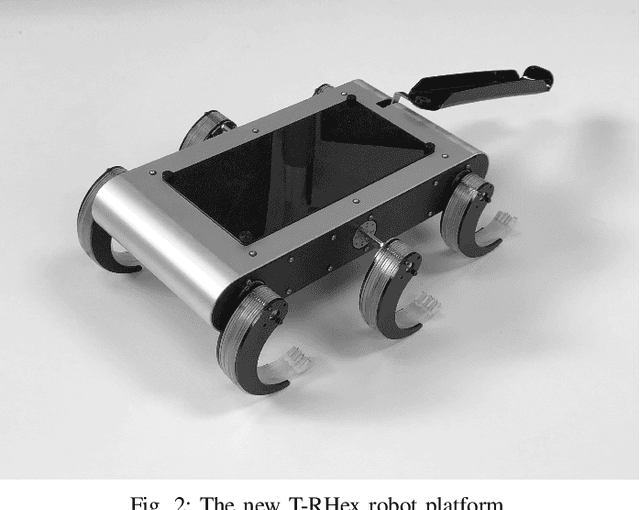
Modern climbing robots have risen to great heights, but mechanisms meant to scale cliffs often locomote slowly and over-cautiously on level ground. Here we introduce T-RHex, an iteration on the classic cockroach-inspired hexapod that has been augmented with microspine feet for climbing. T-RHex is a mechanically intelligent platform capable of efficient locomotion on ground with added climbing abilities. The addition of microspines to the T-RHex platform greatly increased the maximum slope angle the robot was capable of maintaining position on and ascending. T-RHex was able to statically hang on slopes up to 135 degrees from horizontal (45 degree overhang) and ascend slopes up to 55 degrees, without impacting ground mobility. We present our experimental data along with plans for future work along this research path.