 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAllometric Scaling Laws for Bipedal Robots
Mar 23, 2026Scaling the design of robots up or down remains a fundamental challenge. While biological systems follow well-established isometric and allometric scaling laws relating mass, stride frequency, velocity, and torque, it is unclear how these relationships translate to robotic systems. In this paper, we generate similar allometric scaling laws for bipedal robots across three orders of magnitude in leg length. First, we conduct a review of legged robots from the literature and extract empirical relationships between leg length (L), body length, mass, and speed. These data show that robot mass scales more closely to L^2, in contrast to the L^3 scaling predicted by isometric scaling. We then perform controlled simulation studies in Drake using three variants of real quasi-passive, hip-actuated walkers with different foot geometries and control strategies. We evaluate the performance of each design scaled with leg length, L. Across all robots, walking velocity follows the expected L^(1/2) trend from dynamic similarity. Minimum required torque scales more closely with m*L than the isometric model of m*L^2. Foot geometry scaled proportionally with L^1. These results provide new insight into how robot designs allometrically scale to different sizes, and how that scaling is different from isometric or biological scaling laws.
Airflow Source Seeking on Small Quadrotors Using a Single Flow Sensor
Jan 22, 2026As environmental disasters happen more frequently and severely, seeking the source of pollutants or harmful particulates using plume tracking becomes even more important. Plume tracking on small quadrotors would allow these systems to operate around humans and fly in more confined spaces, but can be challenging due to poor sensitivity and long response times from gas sensors that fit on small quadrotors. In this work, we present an approach to complement chemical plume tracking with airflow source-seeking behavior using a custom flow sensor that can sense both airflow magnitude and direction on small quadrotors < 100 g. We use this sensor to implement a modified version of the `Cast and Surge' algorithm that takes advantage of flow direction sensing to find and navigate towards flow sources. A series of characterization experiments verified that the system can detect airflow while in flight and reorient the quadrotor toward the airflow. Several trials with random starting locations and orientations were used to show that our source-seeking algorithm can reliably find a flow source. This work aims to provide a foundation for future platforms that can use flow sensors in concert with other sensors to enable richer plume tracking data collection and source-seeking.
Zippy: The smallest power-autonomous bipedal robot
May 08, 2025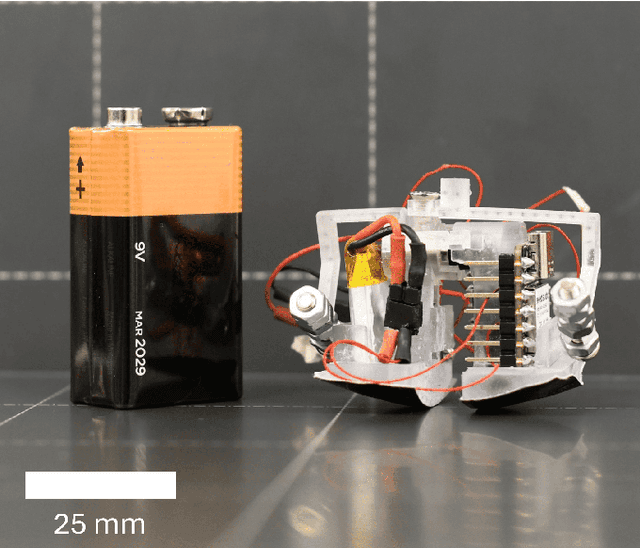
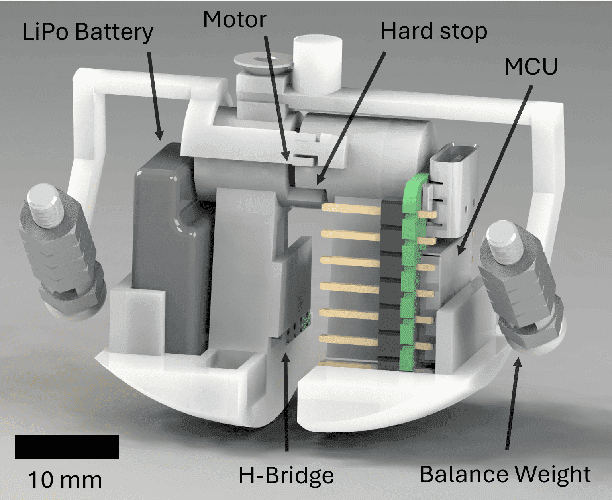
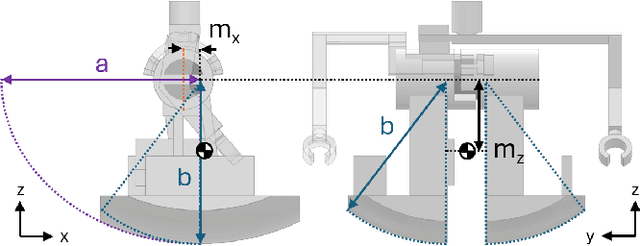
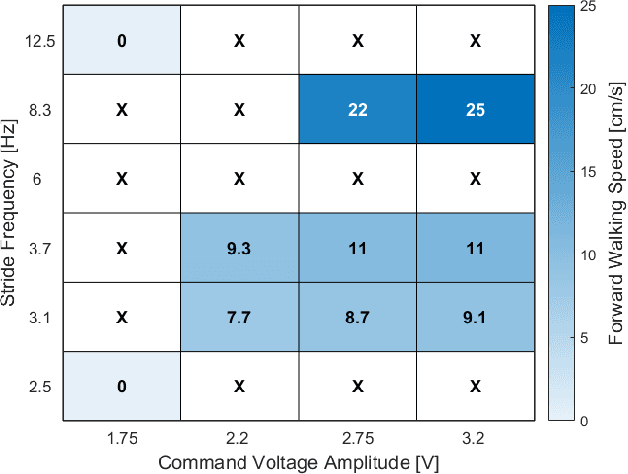
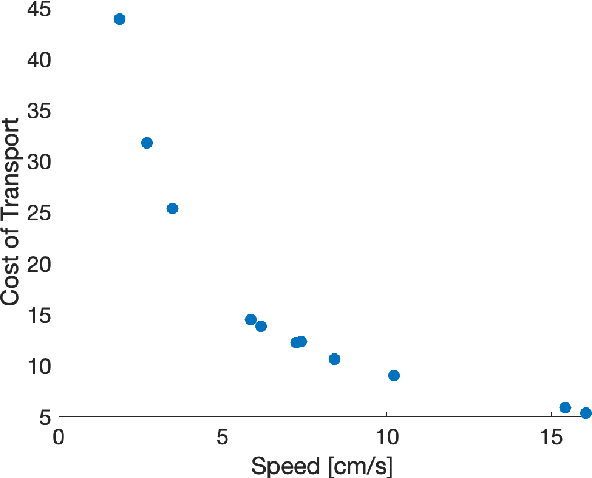
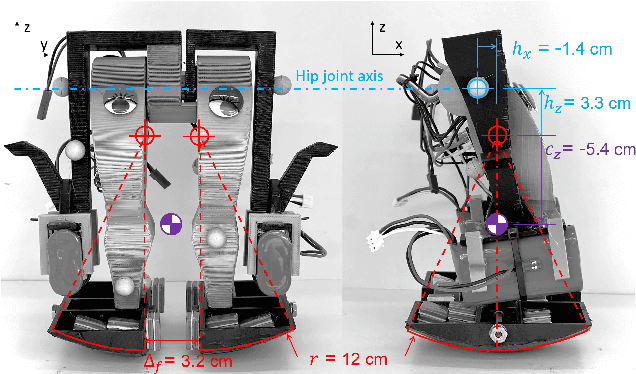
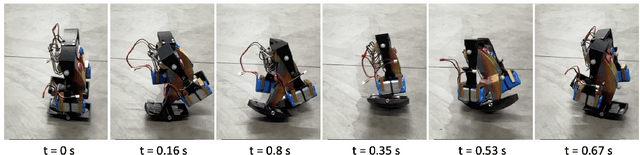
Miniaturizing legged robot platforms is challenging due to hardware limitations that constrain the number, power density, and precision of actuators at that size. By leveraging design principles of quasi-passive walking robots at any scale, stable locomotion and steering can be achieved with simple mechanisms and open-loop control. Here, we present the design and control of "Zippy", the smallest self-contained bipedal walking robot at only 3.6 cm tall. Zippy has rounded feet, a single motor without feedback control, and is capable of turning, skipping, and ascending steps. At its fastest pace, the robot achieves a forward walking speed of 25 cm/s, which is 10 leg lengths per second, the fastest biped robot of any size by that metric. This work explores the design and performance of the robot and compares it to similar dynamic walking robots at larger scales.
Measuring DNA Microswimmer Locomotion in Complex Flow Environments
Dec 19, 2024



Microswimmers are sub-millimeter swimming microrobots that show potential as a platform for controllable locomotion in applications including targeted cargo delivery and minimally invasive surgery. To be viable for these target applications, microswimmers will eventually need to be able to navigate in environments with dynamic fluid flows and forces. Experimental studies with microswimmers towards this goal are currently rare because of the difficulty isolating intentional microswimmer motion from environment-induced motion. In this work, we present a method for measuring microswimmer locomotion within a complex flow environment using fiducial microspheres. By tracking the particle motion of ferromagnetic and non-magnetic polystyrene fiducial microspheres, we capture the effect of fluid flow and field gradients on microswimmer trajectories. We then determine the field-driven translation of these microswimmers relative to fluid flow and demonstrate the effectiveness of this method by illustrating the motion of multiple microswimmers through different flows.
Flow Shadowing: A Method to Detect Multiple Flow Headings using an Array of Densely Packed Whisker-inspired Sensors
Jun 17, 2024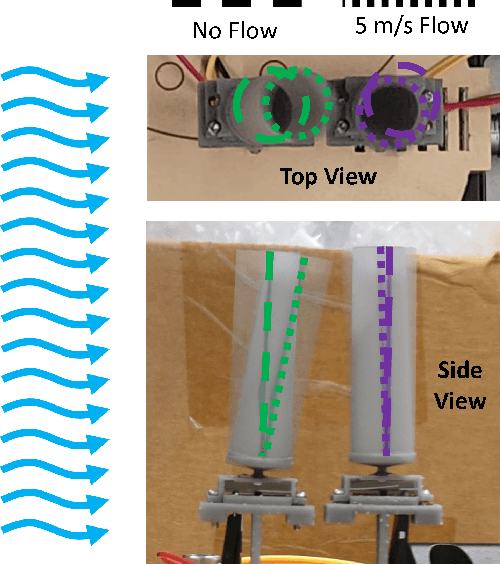
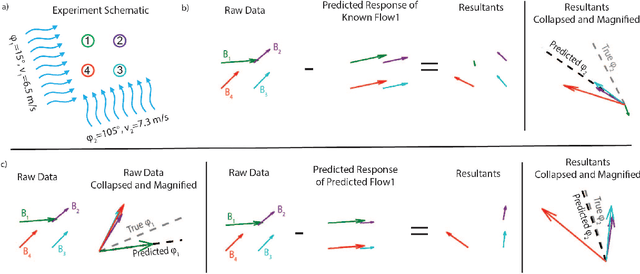
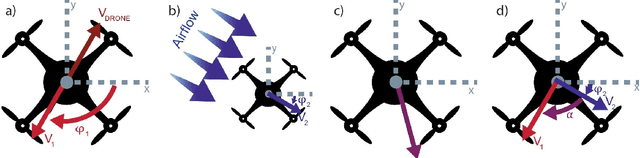
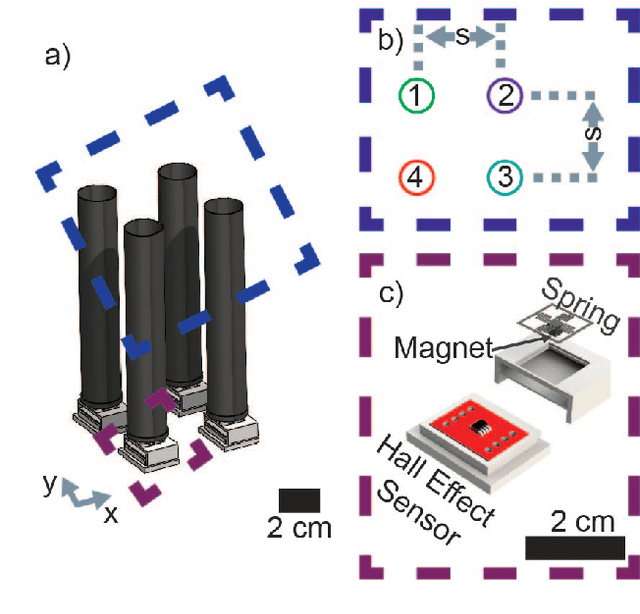
Understanding airflow around a drone is critical for performing advanced maneuvers while maintaining flight stability. Recent research has worked to understand this flow by employing 2D and 3D flow sensors to measure flow from a single source like wind or the drone's relative motion. Our current work advances flow detection by introducing a strategy to distinguish between two flow sources applied simultaneously from different directions. By densely packing an array of flow sensors (or whiskers), we alter the path of airflow as it moves through the array. We have named this technique ``flow shadowing'' because we take advantage of the fact that a downstream whisker shadowed (or occluded) by an upstream whisker receives less incident flow. We show that this relationship is predictable for two whiskers based on the percent of occlusion. We then show that a 2x2 spatial array of whiskers responds asymmetrically when multiple flow sources from different headings are applied to the array. This asymmetry is direction-dependent, allowing us to predict the headings of flow from two different sources, like wind and a drone's relative motion.
The Simplest Walking Robot: A bipedal robot with one actuator and two rigid bodies
Aug 16, 2023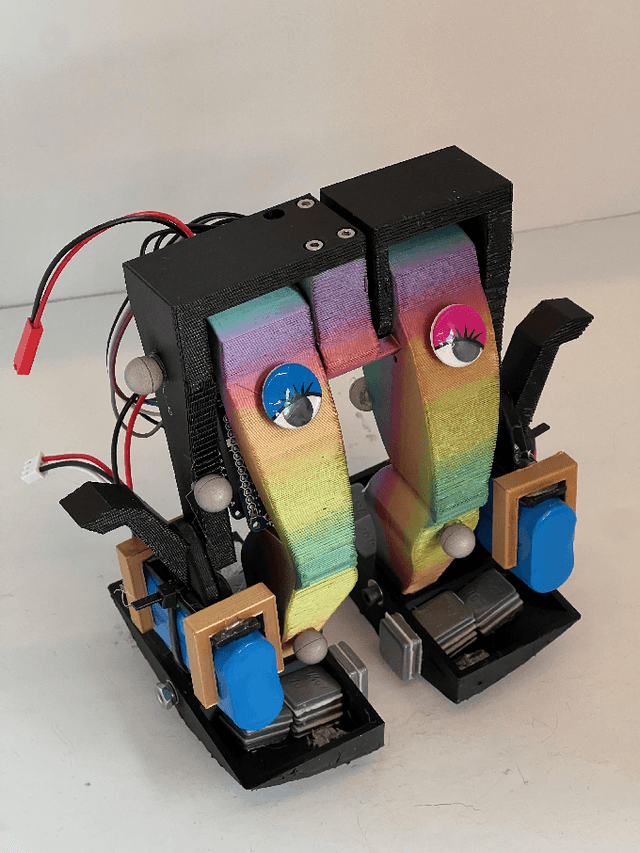
We present the design and experimental results of the first 1-DOF, hip-actuated bipedal robot. While passive dynamic walking is simple by nature, many existing bipeds inspired by this form of walking are complex in control, mechanical design, or both. Our design using only two rigid bodies connected by a single motor aims to enable exploration of walking at smaller sizes where more complex designs cannot be constructed. The walker, "Mugatu", is self-contained and autonomous, open-loop stable over a range of input parameters, able to stop and start from standing, and able to control its heading left and right. We analyze the mechanical design and distill down a set of design rules that enable these behaviors. Experimental evaluations measure speed, energy consumption, and steering.
Design of Whisker-Inspired Sensors for Multi-Directional Hydrodynamic Sensing
Jul 14, 2023This research develops a novel sensor for aquatic robots inspired by the whiskers of harbor seals. This sensor can detect the movement of water, offering valuable data on speed, currents, barriers, and water disturbance. It employs a mechano-magnetic system, separating the whisker-like drag part from the electronic section, enhancing water resistance and durability. The flexible design allows customizing the drag component's shape for different uses. The study uses an analytical model to examine the sensor's capabilities, including aspects such as shape, cross-sectional area, ratio, and immersion depth of the whisker part. It also explores the effects of design on Vortex-Induced Vibrations (VIVs), a key focus in the study of biological and robotic aquatic whiskers. The sensor's practical use was tested on a remote-controlled boat, showing its proficiency in estimating water flow speed. This development has enormous potential to enhance navigation and perception for aquatic robots in various applications.
Design and Characterization of Viscoelastic McKibben Actuators with Tunable Force-Velocity Curves
Jan 11, 2023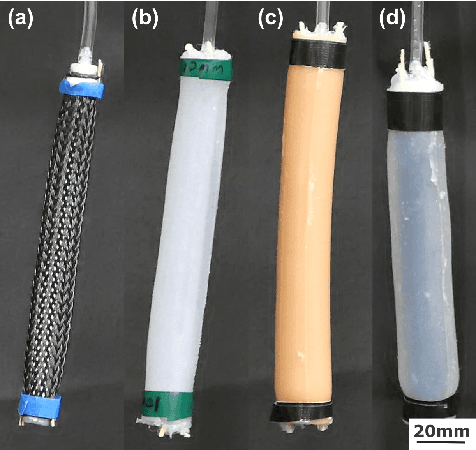

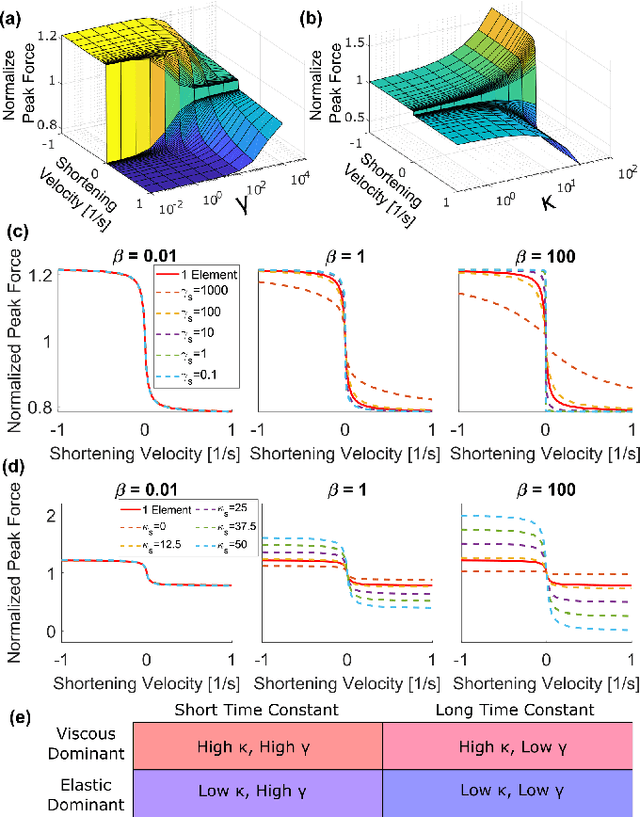
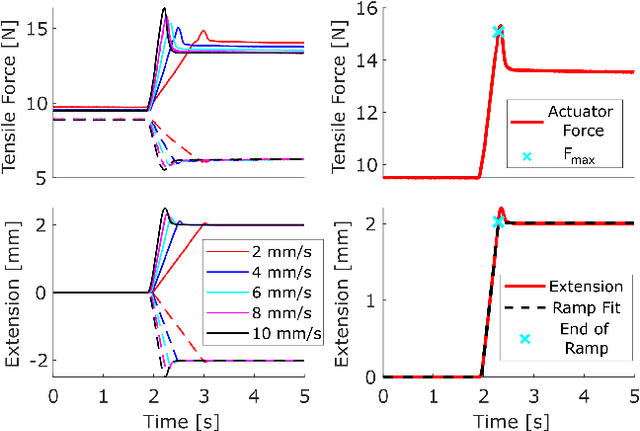
The McKibben pneumatic artificial muscle is a commonly studied soft robotic actuator, and its quasistatic force-length properties have been well characterized and modeled. However, its damping and force-velocity properties are less well studied. Understanding these properties will allow for more robust dynamic modeling of soft robotic systems. The force-velocity response of these actuators is of particular interest because these actuators are often used as hardware models of skeletal muscles for bioinspired robots, and this force-velocity relationship is fundamental to muscle physiology. In this work, we investigated the force-velocity response of McKibben actuators and the ability to tune this response through the use of viscoelastic polymer sheaths. These viscoelastic McKibben actuators (VMAs) were characterized using iso-velocity experiments inspired by skeletal muscle physiology tests. A simplified 1D model of the actuators was developed to connect the shape of the force-velocity curve to the material parameters of the actuator and sheaths. Using these viscoelastic materials, we were able to modulate the shape and magnitude of the actuators' force-velocity curves, and using the developed model, these changes were connected back to the material properties of the sheaths.
Touch the Wind: Simultaneous Airflow, Drag and Interaction Sensing on a Multirotor
Mar 04, 2020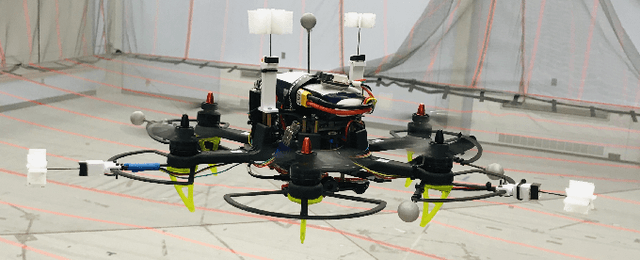
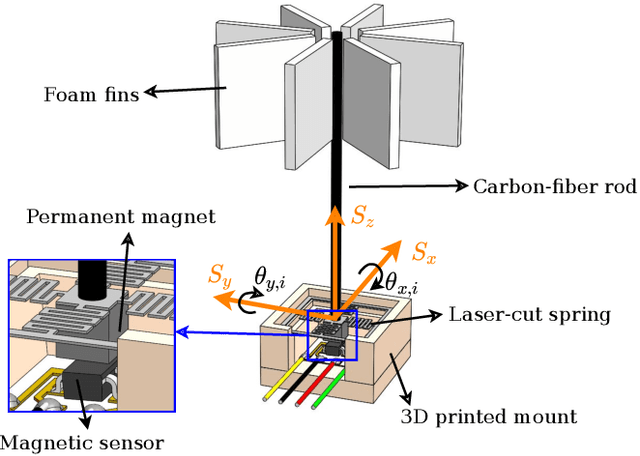
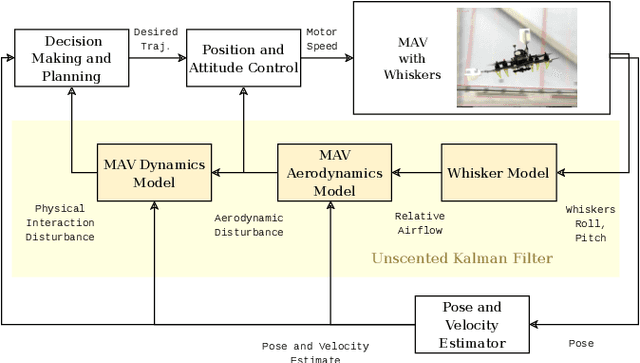
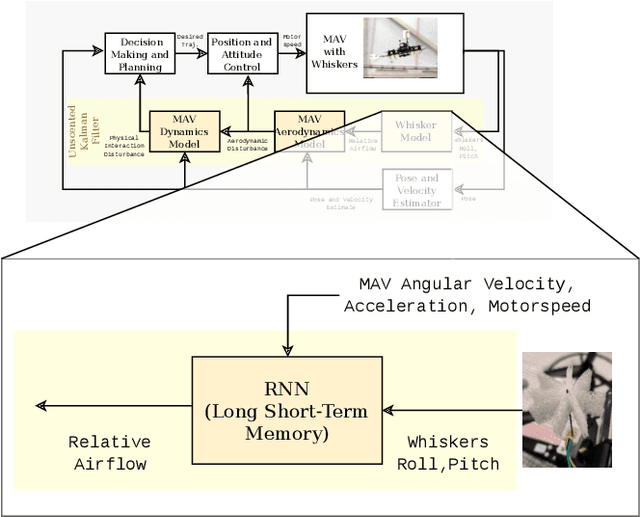
Disturbance estimation for Micro Aerial Vehicles (MAVs) is crucial for robustness and safety. In this paper, we use novel, bio-inspired airflow sensors to measure the airflow acting on a MAV, and we fuse this information in an Unscented Kalman Filter (UKF) to simultaneously estimate the three-dimensional wind vector, the drag force, and other interaction forces (e.g. due to collisions, interaction with a human) acting on the robot. To this end, we present and compare a fully model-based and a deep learning-based strategy. The model-based approach considers the MAV and airflow sensor dynamics and its interaction with the wind, while the deep learning-based strategy uses a Long Short-Term Memory (LSTM) neural network to obtain an estimate of the relative airflow, which is then fused in the proposed filter. We validate our methods in hardware experiments, showing that we can accurately estimate relative airflow of up to 4 m/s, and we can differentiate drag and interaction force.