 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTouch the Wind: Simultaneous Airflow, Drag and Interaction Sensing on a Multirotor
Mar 04, 2020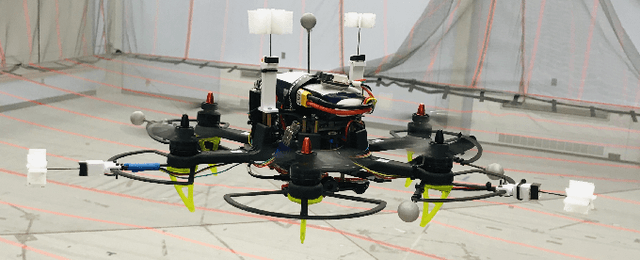
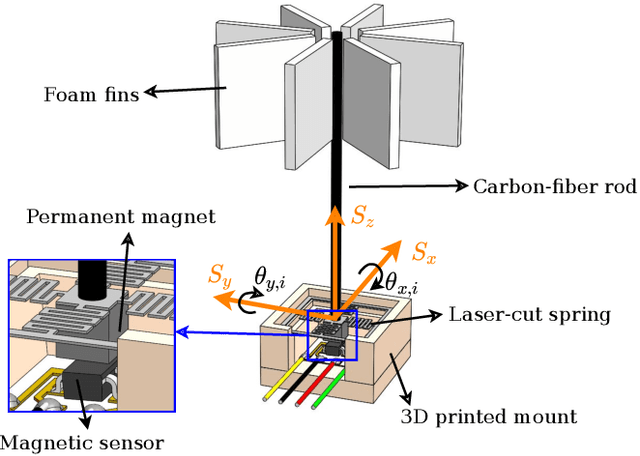
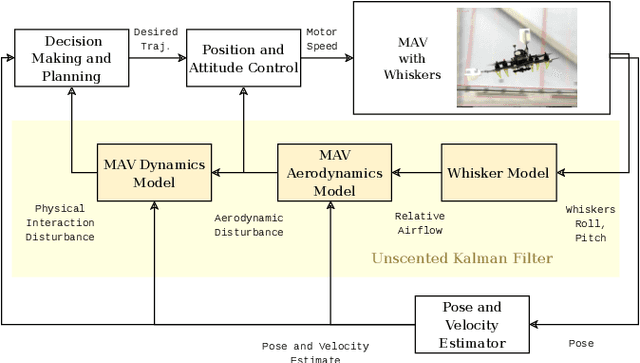
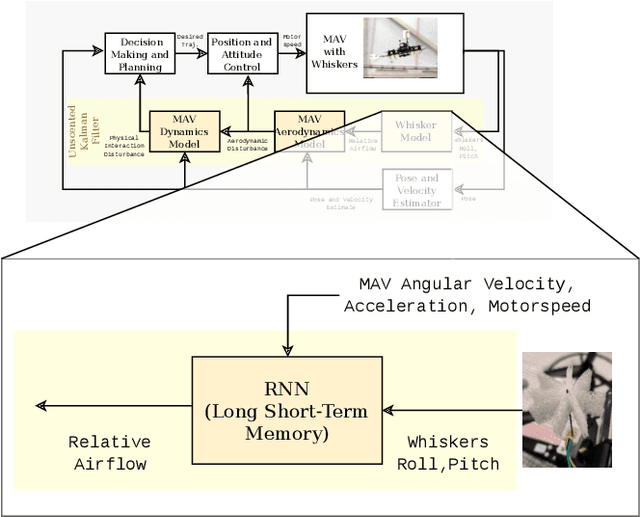
Disturbance estimation for Micro Aerial Vehicles (MAVs) is crucial for robustness and safety. In this paper, we use novel, bio-inspired airflow sensors to measure the airflow acting on a MAV, and we fuse this information in an Unscented Kalman Filter (UKF) to simultaneously estimate the three-dimensional wind vector, the drag force, and other interaction forces (e.g. due to collisions, interaction with a human) acting on the robot. To this end, we present and compare a fully model-based and a deep learning-based strategy. The model-based approach considers the MAV and airflow sensor dynamics and its interaction with the wind, while the deep learning-based strategy uses a Long Short-Term Memory (LSTM) neural network to obtain an estimate of the relative airflow, which is then fused in the proposed filter. We validate our methods in hardware experiments, showing that we can accurately estimate relative airflow of up to 4 m/s, and we can differentiate drag and interaction force.
A Distributed Pipeline for Scalable, Deconflicted Formation Flying
Mar 04, 2020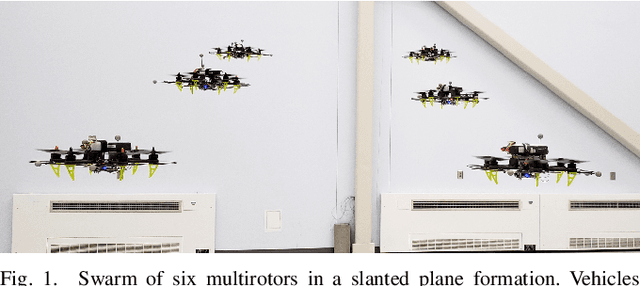
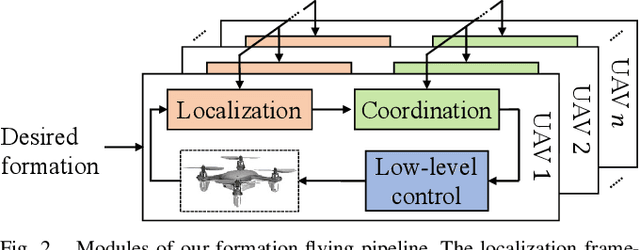

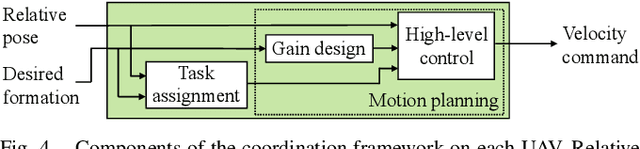
Reliance on external localization infrastructure and centralized coordination are main limiting factors for formation flying of vehicles in large numbers and in unprepared environments. While solutions using onboard localization address the dependency on external infrastructure, the associated coordination strategies typically lack collision avoidance and scalability. To address these shortcomings, we present a unified pipeline with onboard localization and a distributed, collision-free motion planning strategy that scales to a large number of vehicles. Since distributed collision avoidance strategies are known to result in gridlock, we also present a decentralized task assignment solution to deconflict vehicles. We experimentally validate our pipeline in simulation and hardware. The results show that our approach for solving the optimization problem associated with motion planning gives solutions within seconds in cases where general purpose solvers fail due to high complexity. In addition, our lightweight assignment strategy leads to successful and quicker formation convergence in 96-100% of all trials, whereas indefinite gridlocks occur without it for 33-50% of trials. By enabling large-scale, deconflicted coordination, this pipeline should help pave the way for anytime, anywhere deployment of aerial swarms.