 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGFlowPO: Generative Flow Network as a Language Model Prompt Optimizer
Feb 03, 2026Finding effective prompts for language models (LMs) is critical yet notoriously difficult: the prompt space is combinatorially large, rewards are sparse due to expensive target-LM evaluation. Yet, existing RL-based prompt optimizers often rely on on-policy updates and a meta-prompt sampled from a fixed distribution, leading to poor sample efficiency. We propose GFlowPO, a probabilistic prompt optimization framework that casts prompt search as a posterior inference problem over latent prompts regularized by a meta-prompted reference-LM prior. In the first step, we fine-tune a lightweight prompt-LM with an off-policy Generative Flow Network (GFlowNet) objective, using a replay-based training policy that reuses past prompt evaluations to enable sample-efficient exploration. In the second step, we introduce Dynamic Memory Update (DMU), a training-free mechanism that updates the meta-prompt by injecting both (i) diverse prompts from a replay buffer and (ii) top-performing prompts from a small priority queue, thereby progressively concentrating the search process on high-reward regions. Across few-shot text classification, instruction induction benchmarks, and question answering tasks, GFlowPO consistently outperforms recent discrete prompt optimization baselines.
Touch the Wind: Simultaneous Airflow, Drag and Interaction Sensing on a Multirotor
Mar 04, 2020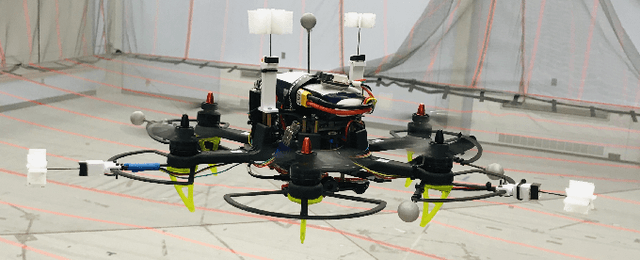
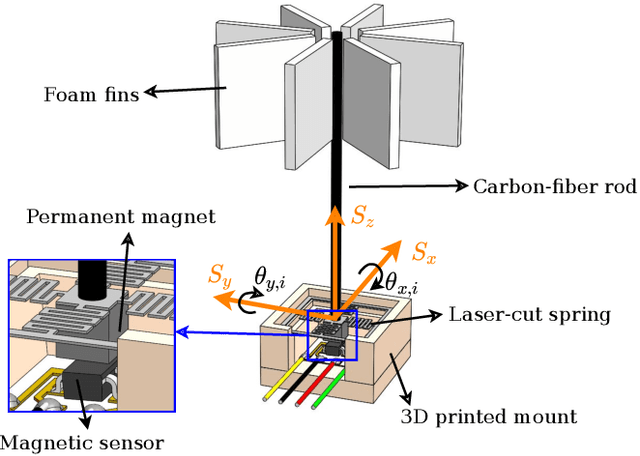
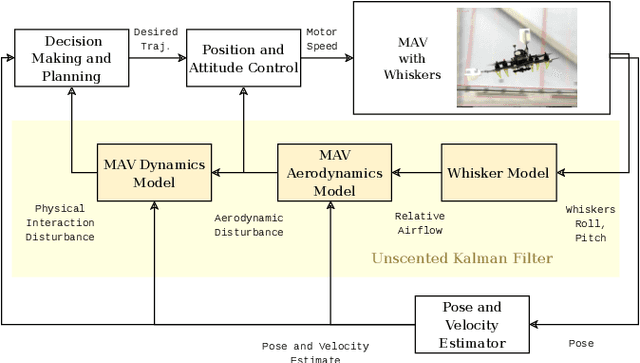
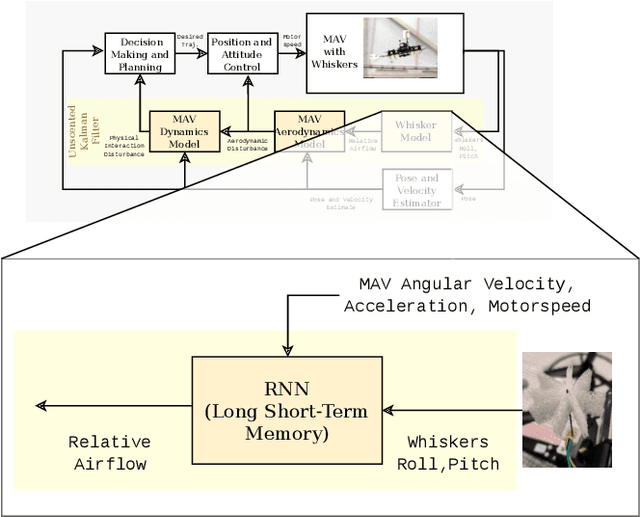
Disturbance estimation for Micro Aerial Vehicles (MAVs) is crucial for robustness and safety. In this paper, we use novel, bio-inspired airflow sensors to measure the airflow acting on a MAV, and we fuse this information in an Unscented Kalman Filter (UKF) to simultaneously estimate the three-dimensional wind vector, the drag force, and other interaction forces (e.g. due to collisions, interaction with a human) acting on the robot. To this end, we present and compare a fully model-based and a deep learning-based strategy. The model-based approach considers the MAV and airflow sensor dynamics and its interaction with the wind, while the deep learning-based strategy uses a Long Short-Term Memory (LSTM) neural network to obtain an estimate of the relative airflow, which is then fused in the proposed filter. We validate our methods in hardware experiments, showing that we can accurately estimate relative airflow of up to 4 m/s, and we can differentiate drag and interaction force.