 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGFlowPO: Generative Flow Network as a Language Model Prompt Optimizer
Feb 03, 2026Finding effective prompts for language models (LMs) is critical yet notoriously difficult: the prompt space is combinatorially large, rewards are sparse due to expensive target-LM evaluation. Yet, existing RL-based prompt optimizers often rely on on-policy updates and a meta-prompt sampled from a fixed distribution, leading to poor sample efficiency. We propose GFlowPO, a probabilistic prompt optimization framework that casts prompt search as a posterior inference problem over latent prompts regularized by a meta-prompted reference-LM prior. In the first step, we fine-tune a lightweight prompt-LM with an off-policy Generative Flow Network (GFlowNet) objective, using a replay-based training policy that reuses past prompt evaluations to enable sample-efficient exploration. In the second step, we introduce Dynamic Memory Update (DMU), a training-free mechanism that updates the meta-prompt by injecting both (i) diverse prompts from a replay buffer and (ii) top-performing prompts from a small priority queue, thereby progressively concentrating the search process on high-reward regions. Across few-shot text classification, instruction induction benchmarks, and question answering tasks, GFlowPO consistently outperforms recent discrete prompt optimization baselines.
Mr.Steve: Instruction-Following Agents in Minecraft with What-Where-When Memory
Nov 12, 2024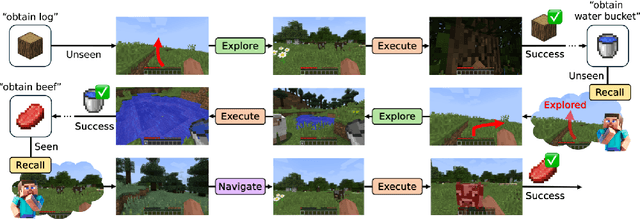
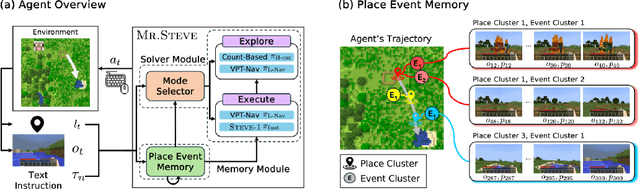
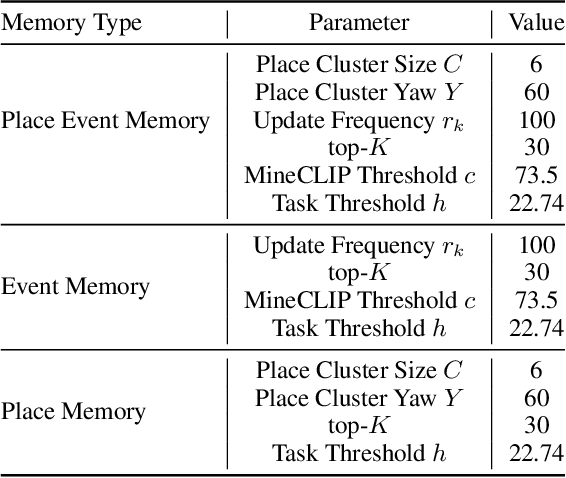
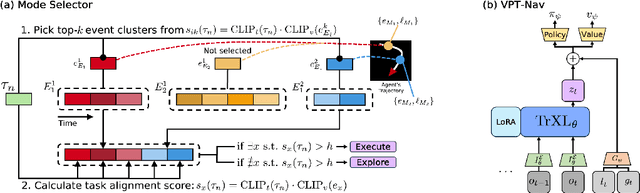
Significant advances have been made in developing general-purpose embodied AI in environments like Minecraft through the adoption of LLM-augmented hierarchical approaches. While these approaches, which combine high-level planners with low-level controllers, show promise, low-level controllers frequently become performance bottlenecks due to repeated failures. In this paper, we argue that the primary cause of failure in many low-level controllers is the absence of an episodic memory system. To address this, we introduce Mr. Steve (Memory Recall Steve-1), a novel low-level controller equipped with Place Event Memory (PEM), a form of episodic memory that captures what, where, and when information from episodes. This directly addresses the main limitation of the popular low-level controller, Steve-1. Unlike previous models that rely on short-term memory, PEM organizes spatial and event-based data, enabling efficient recall and navigation in long-horizon tasks. Additionally, we propose an Exploration Strategy and a Memory-Augmented Task Solving Framework, allowing agents to alternate between exploration and task-solving based on recalled events. Our approach significantly improves task-solving and exploration efficiency compared to existing methods. We will release our code and demos on the project page: https://sites.google.com/view/mr-steve.
Spatially-Aware Transformer for Embodied Agents
Mar 01, 2024



Episodic memory plays a crucial role in various cognitive processes, such as the ability to mentally recall past events. While cognitive science emphasizes the significance of spatial context in the formation and retrieval of episodic memory, the current primary approach to implementing episodic memory in AI systems is through transformers that store temporally ordered experiences, which overlooks the spatial dimension. As a result, it is unclear how the underlying structure could be extended to incorporate the spatial axis beyond temporal order alone and thereby what benefits can be obtained. To address this, this paper explores the use of Spatially-Aware Transformer models that incorporate spatial information. These models enable the creation of place-centric episodic memory that considers both temporal and spatial dimensions. Adopting this approach, we demonstrate that memory utilization efficiency can be improved, leading to enhanced accuracy in various place-centric downstream tasks. Additionally, we propose the Adaptive Memory Allocator, a memory management method based on reinforcement learning that aims to optimize efficiency of memory utilization. Our experiments demonstrate the advantages of our proposed model in various environments and across multiple downstream tasks, including prediction, generation, reasoning, and reinforcement learning. The source code for our models and experiments will be available at https://github.com/junmokane/spatially-aware-transformer.
Inducing Functions through Reinforcement Learning without Task Specification
Nov 23, 2021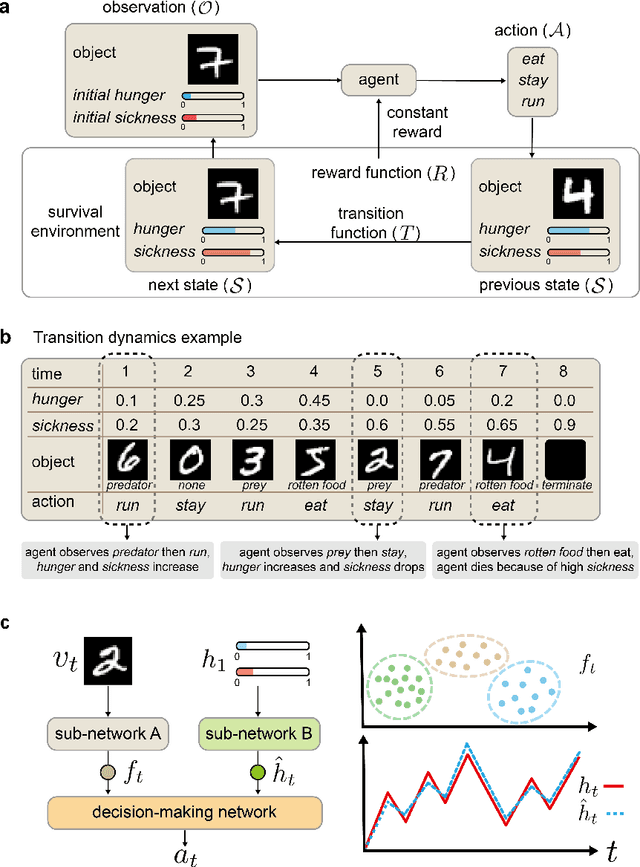
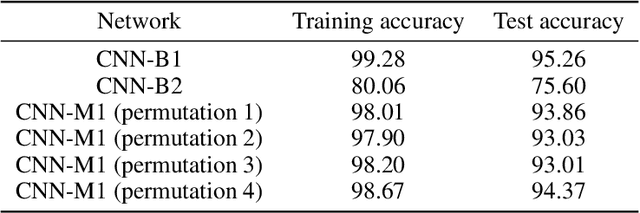
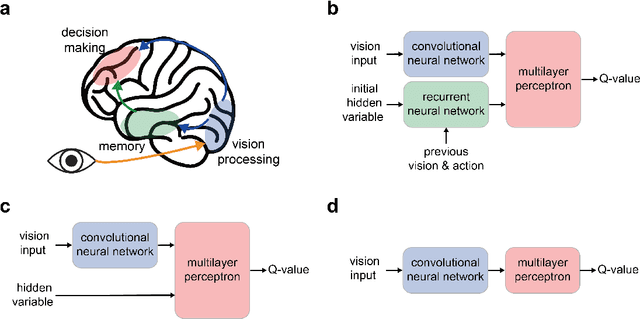
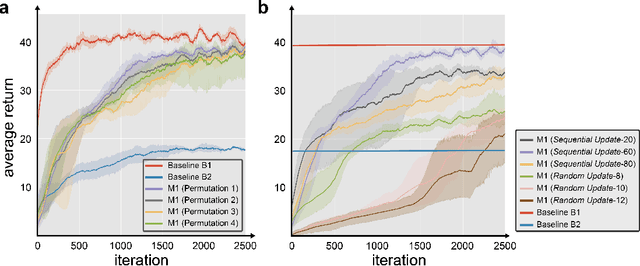
We report a bio-inspired framework for training a neural network through reinforcement learning to induce high level functions within the network. Based on the interpretation that animals have gained their cognitive functions such as object recognition - without ever being specifically trained for - as a result of maximizing their fitness to the environment, we place our agent in an environment where developing certain functions may facilitate decision making. The experimental results show that high level functions, such as image classification and hidden variable estimation, can be naturally and simultaneously induced without any pre-training or specifying them.