 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Characterization of Viscoelastic McKibben Actuators with Tunable Force-Velocity Curves
Jan 11, 2023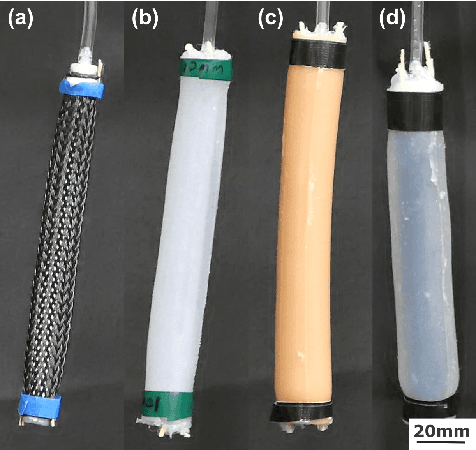

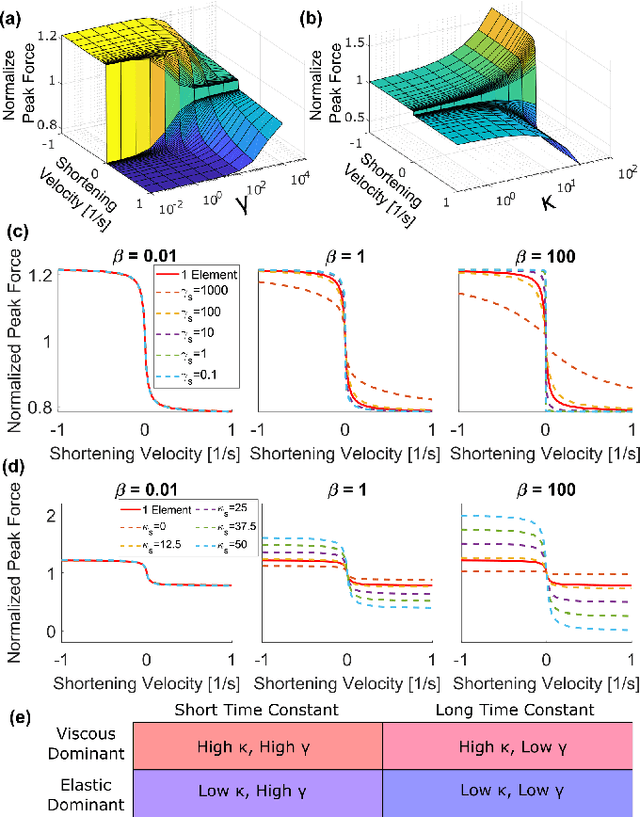
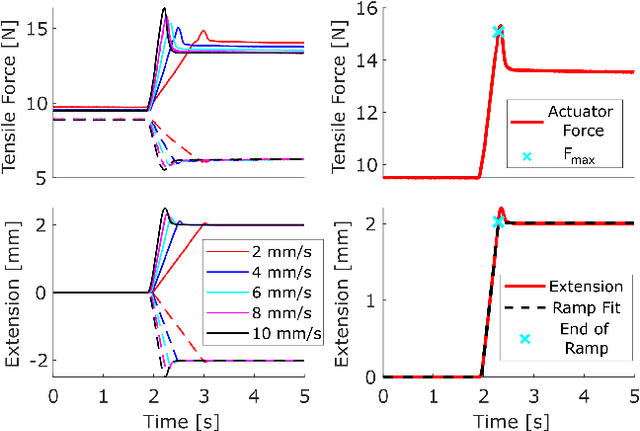
The McKibben pneumatic artificial muscle is a commonly studied soft robotic actuator, and its quasistatic force-length properties have been well characterized and modeled. However, its damping and force-velocity properties are less well studied. Understanding these properties will allow for more robust dynamic modeling of soft robotic systems. The force-velocity response of these actuators is of particular interest because these actuators are often used as hardware models of skeletal muscles for bioinspired robots, and this force-velocity relationship is fundamental to muscle physiology. In this work, we investigated the force-velocity response of McKibben actuators and the ability to tune this response through the use of viscoelastic polymer sheaths. These viscoelastic McKibben actuators (VMAs) were characterized using iso-velocity experiments inspired by skeletal muscle physiology tests. A simplified 1D model of the actuators was developed to connect the shape of the force-velocity curve to the material parameters of the actuator and sheaths. Using these viscoelastic materials, we were able to modulate the shape and magnitude of the actuators' force-velocity curves, and using the developed model, these changes were connected back to the material properties of the sheaths.