 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep learning-based neurodevelopmental assessment in preterm infants
Jan 17, 2026Preterm infants (born between 28 and 37 weeks of gestation) face elevated risks of neurodevelopmental delays, making early identification crucial for timely intervention. While deep learning-based volumetric segmentation of brain MRI scans offers a promising avenue for assessing neonatal neurodevelopment, achieving accurate segmentation of white matter (WM) and gray matter (GM) in preterm infants remains challenging due to their comparable signal intensities (isointense appearance) on MRI during early brain development. To address this, we propose a novel segmentation neural network, named Hierarchical Dense Attention Network. Our architecture incorporates a 3D spatial-channel attention mechanism combined with an attention-guided dense upsampling strategy to enhance feature discrimination in low-contrast volumetric data. Quantitative experiments demonstrate that our method achieves superior segmentation performance compared to state-of-the-art baselines, effectively tackling the challenge of isointense tissue differentiation. Furthermore, application of our algorithm confirms that WM and GM volumes in preterm infants are significantly lower than those in term infants, providing additional imaging evidence of the neurodevelopmental delays associated with preterm birth. The code is available at: https://github.com/ICL-SUST/HDAN.
DiagnoLLM: A Hybrid Bayesian Neural Language Framework for Interpretable Disease Diagnosis
Nov 16, 2025Building trustworthy clinical AI systems requires not only accurate predictions but also transparent, biologically grounded explanations. We present \texttt{DiagnoLLM}, a hybrid framework that integrates Bayesian deconvolution, eQTL-guided deep learning, and LLM-based narrative generation for interpretable disease diagnosis. DiagnoLLM begins with GP-unmix, a Gaussian Process-based hierarchical model that infers cell-type-specific gene expression profiles from bulk and single-cell RNA-seq data while modeling biological uncertainty. These features, combined with regulatory priors from eQTL analysis, power a neural classifier that achieves high predictive performance in Alzheimer's Disease (AD) detection (88.0\% accuracy). To support human understanding and trust, we introduce an LLM-based reasoning module that translates model outputs into audience-specific diagnostic reports, grounded in clinical features, attribution signals, and domain knowledge. Human evaluations confirm that these reports are accurate, actionable, and appropriately tailored for both physicians and patients. Our findings show that LLMs, when deployed as post-hoc reasoners rather than end-to-end predictors, can serve as effective communicators within hybrid diagnostic pipelines.
GENUINE: Graph Enhanced Multi-level Uncertainty Estimation for Large Language Models
Sep 09, 2025Uncertainty estimation is essential for enhancing the reliability of Large Language Models (LLMs), particularly in high-stakes applications. Existing methods often overlook semantic dependencies, relying on token-level probability measures that fail to capture structural relationships within the generated text. We propose GENUINE: Graph ENhanced mUlti-level uncertaINty Estimation for Large Language Models, a structure-aware framework that leverages dependency parse trees and hierarchical graph pooling to refine uncertainty quantification. By incorporating supervised learning, GENUINE effectively models semantic and structural relationships, improving confidence assessments. Extensive experiments across NLP tasks show that GENUINE achieves up to 29% higher AUROC than semantic entropy-based approaches and reduces calibration errors by over 15%, demonstrating the effectiveness of graph-based uncertainty modeling. The code is available at https://github.com/ODYSSEYWT/GUQ.
Non-exchangeable Conformal Prediction for Temporal Graph Neural Networks
Jul 02, 2025Conformal prediction for graph neural networks (GNNs) offers a promising framework for quantifying uncertainty, enhancing GNN reliability in high-stakes applications. However, existing methods predominantly focus on static graphs, neglecting the evolving nature of real-world graphs. Temporal dependencies in graph structure, node attributes, and ground truth labels violate the fundamental exchangeability assumption of standard conformal prediction methods, limiting their applicability. To address these challenges, in this paper, we introduce NCPNET, a novel end-to-end conformal prediction framework tailored for temporal graphs. Our approach extends conformal prediction to dynamic settings, mitigating statistical coverage violations induced by temporal dependencies. To achieve this, we propose a diffusion-based non-conformity score that captures both topological and temporal uncertainties within evolving networks. Additionally, we develop an efficiency-aware optimization algorithm that improves the conformal prediction process, enhancing computational efficiency and reducing coverage violations. Extensive experiments on diverse real-world temporal graphs, including WIKI, REDDIT, DBLP, and IBM Anti-Money Laundering dataset, demonstrate NCPNET's capability to ensure guaranteed coverage in temporal graphs, achieving up to a 31% reduction in prediction set size on the WIKI dataset, significantly improving efficiency compared to state-of-the-art methods. Our data and code are available at https://github.com/ODYSSEYWT/NCPNET.
Design of Whisker-Inspired Sensors for Multi-Directional Hydrodynamic Sensing
Jul 14, 2023This research develops a novel sensor for aquatic robots inspired by the whiskers of harbor seals. This sensor can detect the movement of water, offering valuable data on speed, currents, barriers, and water disturbance. It employs a mechano-magnetic system, separating the whisker-like drag part from the electronic section, enhancing water resistance and durability. The flexible design allows customizing the drag component's shape for different uses. The study uses an analytical model to examine the sensor's capabilities, including aspects such as shape, cross-sectional area, ratio, and immersion depth of the whisker part. It also explores the effects of design on Vortex-Induced Vibrations (VIVs), a key focus in the study of biological and robotic aquatic whiskers. The sensor's practical use was tested on a remote-controlled boat, showing its proficiency in estimating water flow speed. This development has enormous potential to enhance navigation and perception for aquatic robots in various applications.
Design and Characterization of Viscoelastic McKibben Actuators with Tunable Force-Velocity Curves
Jan 11, 2023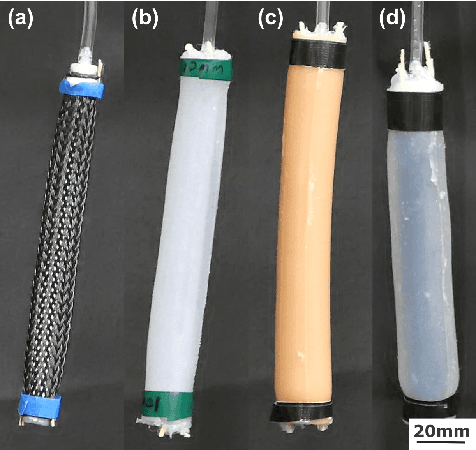

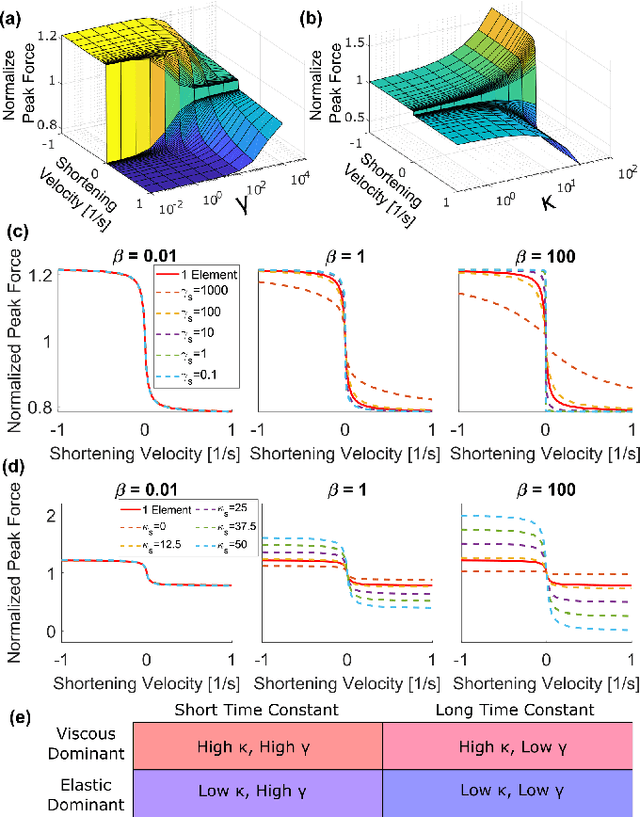
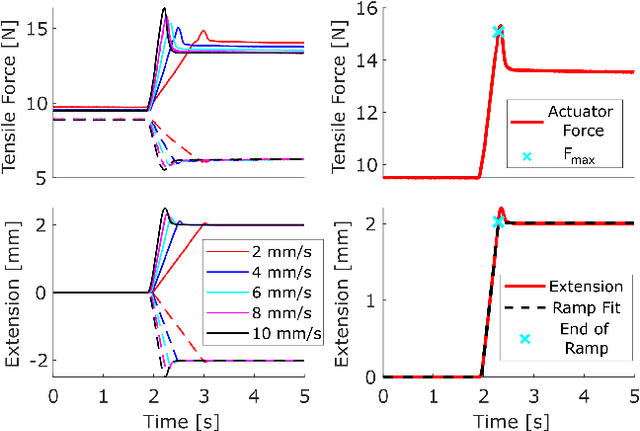
The McKibben pneumatic artificial muscle is a commonly studied soft robotic actuator, and its quasistatic force-length properties have been well characterized and modeled. However, its damping and force-velocity properties are less well studied. Understanding these properties will allow for more robust dynamic modeling of soft robotic systems. The force-velocity response of these actuators is of particular interest because these actuators are often used as hardware models of skeletal muscles for bioinspired robots, and this force-velocity relationship is fundamental to muscle physiology. In this work, we investigated the force-velocity response of McKibben actuators and the ability to tune this response through the use of viscoelastic polymer sheaths. These viscoelastic McKibben actuators (VMAs) were characterized using iso-velocity experiments inspired by skeletal muscle physiology tests. A simplified 1D model of the actuators was developed to connect the shape of the force-velocity curve to the material parameters of the actuator and sheaths. Using these viscoelastic materials, we were able to modulate the shape and magnitude of the actuators' force-velocity curves, and using the developed model, these changes were connected back to the material properties of the sheaths.