 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeasuring DNA Microswimmer Locomotion in Complex Flow Environments
Dec 19, 2024



Microswimmers are sub-millimeter swimming microrobots that show potential as a platform for controllable locomotion in applications including targeted cargo delivery and minimally invasive surgery. To be viable for these target applications, microswimmers will eventually need to be able to navigate in environments with dynamic fluid flows and forces. Experimental studies with microswimmers towards this goal are currently rare because of the difficulty isolating intentional microswimmer motion from environment-induced motion. In this work, we present a method for measuring microswimmer locomotion within a complex flow environment using fiducial microspheres. By tracking the particle motion of ferromagnetic and non-magnetic polystyrene fiducial microspheres, we capture the effect of fluid flow and field gradients on microswimmer trajectories. We then determine the field-driven translation of these microswimmers relative to fluid flow and demonstrate the effectiveness of this method by illustrating the motion of multiple microswimmers through different flows.
Flow Shadowing: A Method to Detect Multiple Flow Headings using an Array of Densely Packed Whisker-inspired Sensors
Jun 17, 2024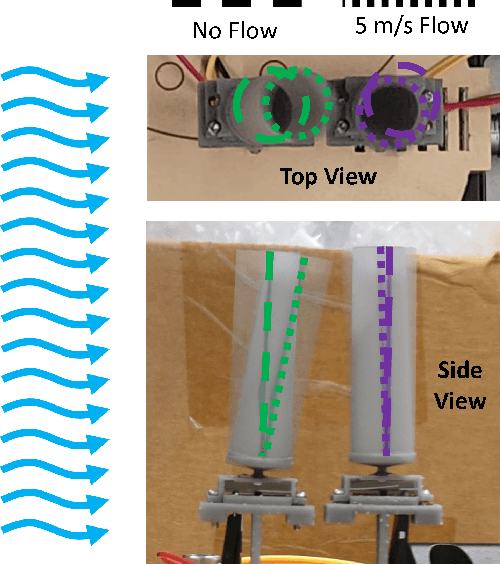
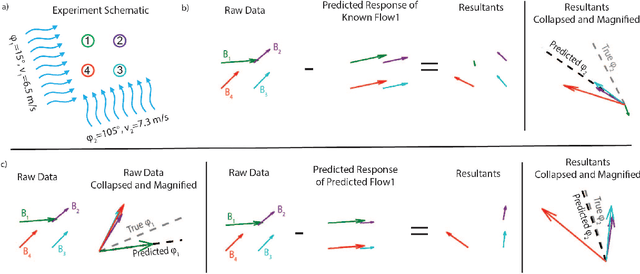
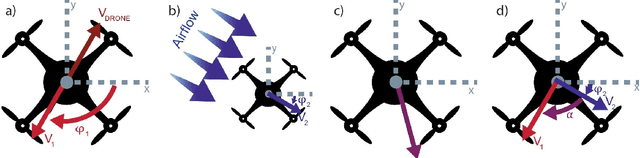
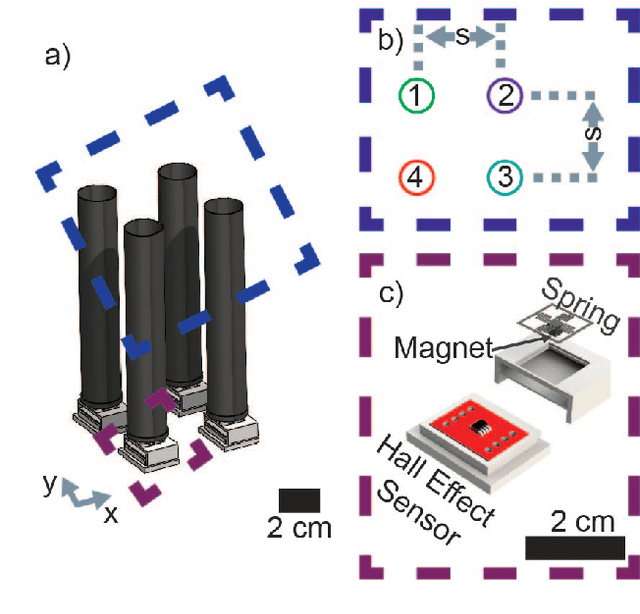
Understanding airflow around a drone is critical for performing advanced maneuvers while maintaining flight stability. Recent research has worked to understand this flow by employing 2D and 3D flow sensors to measure flow from a single source like wind or the drone's relative motion. Our current work advances flow detection by introducing a strategy to distinguish between two flow sources applied simultaneously from different directions. By densely packing an array of flow sensors (or whiskers), we alter the path of airflow as it moves through the array. We have named this technique ``flow shadowing'' because we take advantage of the fact that a downstream whisker shadowed (or occluded) by an upstream whisker receives less incident flow. We show that this relationship is predictable for two whiskers based on the percent of occlusion. We then show that a 2x2 spatial array of whiskers responds asymmetrically when multiple flow sources from different headings are applied to the array. This asymmetry is direction-dependent, allowing us to predict the headings of flow from two different sources, like wind and a drone's relative motion.
Design of Whisker-Inspired Sensors for Multi-Directional Hydrodynamic Sensing
Jul 14, 2023This research develops a novel sensor for aquatic robots inspired by the whiskers of harbor seals. This sensor can detect the movement of water, offering valuable data on speed, currents, barriers, and water disturbance. It employs a mechano-magnetic system, separating the whisker-like drag part from the electronic section, enhancing water resistance and durability. The flexible design allows customizing the drag component's shape for different uses. The study uses an analytical model to examine the sensor's capabilities, including aspects such as shape, cross-sectional area, ratio, and immersion depth of the whisker part. It also explores the effects of design on Vortex-Induced Vibrations (VIVs), a key focus in the study of biological and robotic aquatic whiskers. The sensor's practical use was tested on a remote-controlled boat, showing its proficiency in estimating water flow speed. This development has enormous potential to enhance navigation and perception for aquatic robots in various applications.