 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Simplest Walking Robot: A bipedal robot with one actuator and two rigid bodies
Paper and Code
Aug 16, 2023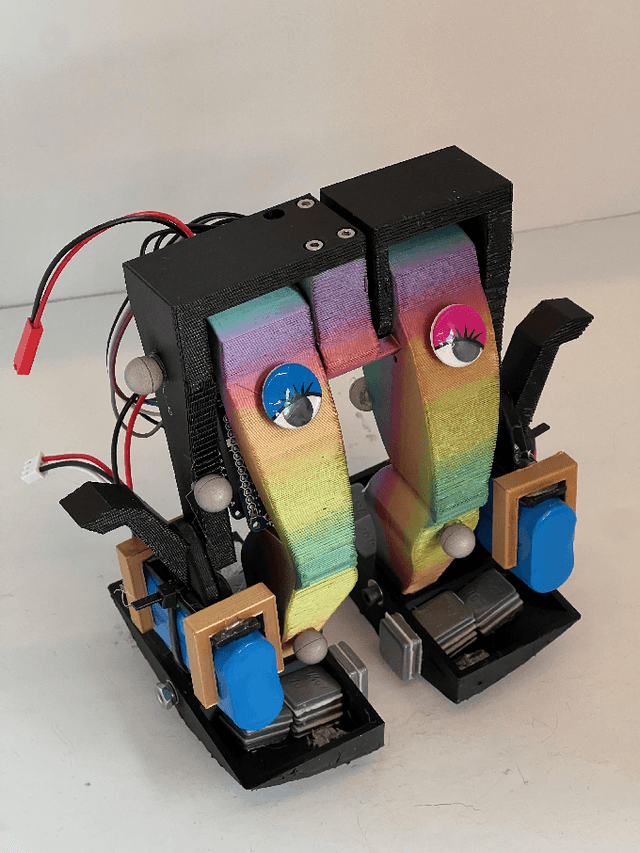
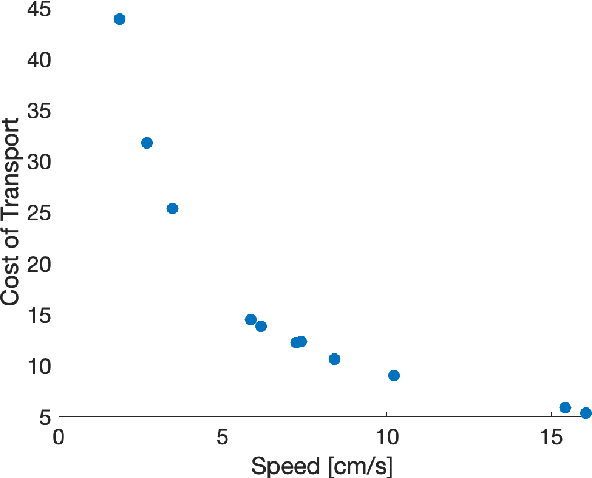
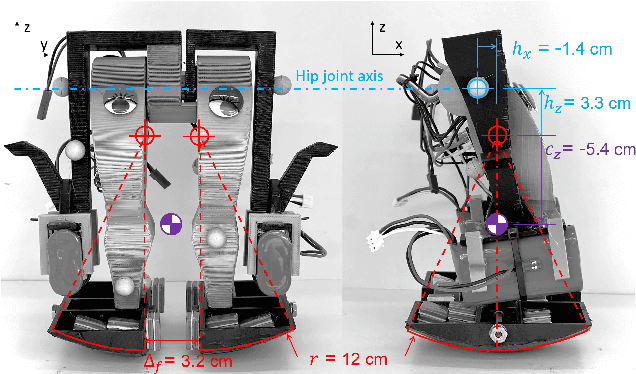
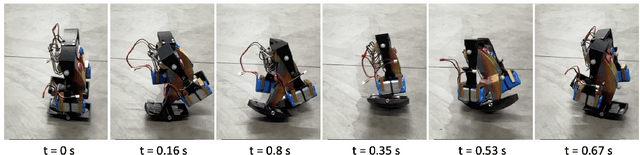
We present the design and experimental results of the first 1-DOF, hip-actuated bipedal robot. While passive dynamic walking is simple by nature, many existing bipeds inspired by this form of walking are complex in control, mechanical design, or both. Our design using only two rigid bodies connected by a single motor aims to enable exploration of walking at smaller sizes where more complex designs cannot be constructed. The walker, "Mugatu", is self-contained and autonomous, open-loop stable over a range of input parameters, able to stop and start from standing, and able to control its heading left and right. We analyze the mechanical design and distill down a set of design rules that enable these behaviors. Experimental evaluations measure speed, energy consumption, and steering.