 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuperLoc: The Key to Robust LiDAR-Inertial Localization Lies in Predicting Alignment Risks
Dec 03, 2024



Map-based LiDAR localization, while widely used in autonomous systems, faces significant challenges in degraded environments due to lacking distinct geometric features. This paper introduces SuperLoc, a robust LiDAR localization package that addresses key limitations in existing methods. SuperLoc features a novel predictive alignment risk assessment technique, enabling early detection and mitigation of potential failures before optimization. This approach significantly improves performance in challenging scenarios such as corridors, tunnels, and caves. Unlike existing degeneracy mitigation algorithms that rely on post-optimization analysis and heuristic thresholds, SuperLoc evaluates the localizability of raw sensor measurements. Experimental results demonstrate significant performance improvements over state-of-the-art methods across various degraded environments. Our approach achieves a 54% increase in accuracy and exhibits the highest robustness. To facilitate further research, we release our implementation along with datasets from eight challenging scenarios
Quatro++: Robust Global Registration Exploiting Ground Segmentation for Loop Closing in LiDAR SLAM
Nov 02, 2023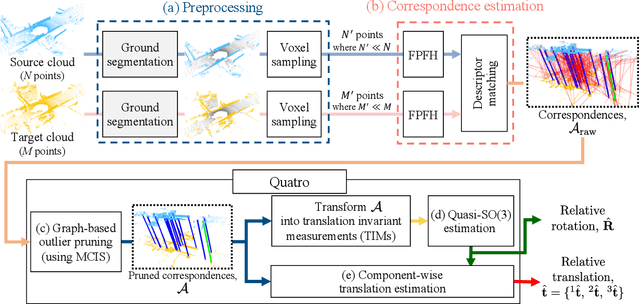
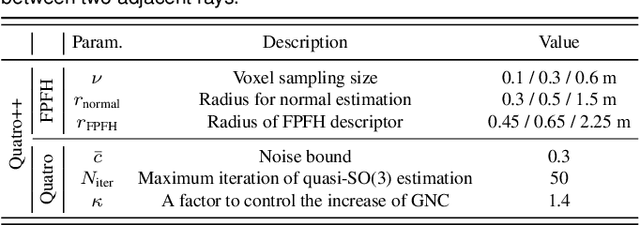
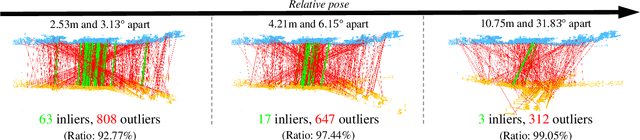

Global registration is a fundamental task that estimates the relative pose between two viewpoints of 3D point clouds. However, there are two issues that degrade the performance of global registration in LiDAR SLAM: one is the sparsity issue and the other is degeneracy. The sparsity issue is caused by the sparse characteristics of the 3D point cloud measurements in a mechanically spinning LiDAR sensor. The degeneracy issue sometimes occurs because the outlier-rejection methods reject too many correspondences, leaving less than three inliers. These two issues have become more severe as the pose discrepancy between the two viewpoints of 3D point clouds becomes greater. To tackle these problems, we propose a robust global registration framework, called \textit{Quatro++}. Extending our previous work that solely focused on the global registration itself, we address the robust global registration in terms of the loop closing in LiDAR SLAM. To this end, ground segmentation is exploited to achieve robust global registration. Through the experiments, we demonstrate that our proposed method shows a higher success rate than the state-of-the-art global registration methods, overcoming the sparsity and degeneracy issues. In addition, we show that ground segmentation significantly helps to increase the success rate for the ground vehicles. Finally, we apply our proposed method to the loop closing module in LiDAR SLAM and confirm that the quality of the loop constraints is improved, showing more precise mapping results. Therefore, the experimental evidence corroborated the suitability of our method as an initial alignment in the loop closing. Our code is available at https://quatro-plusplus.github.io.
AdaLIO: Robust Adaptive LiDAR-Inertial Odometry in Degenerate Indoor Environments
Apr 25, 2023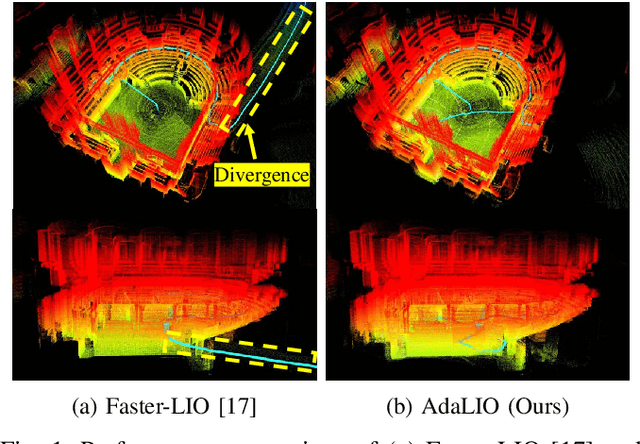
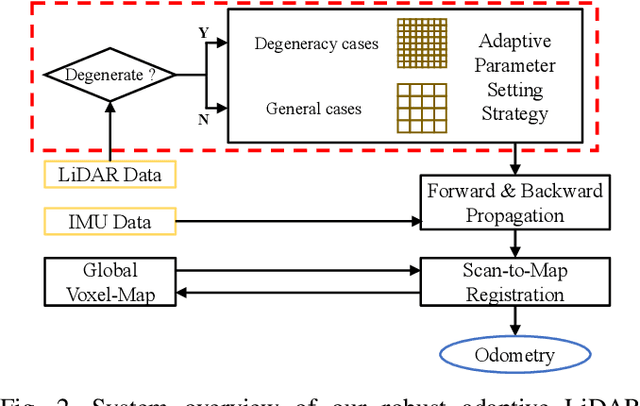
In recent years, the demand for mapping construction sites or buildings using light detection and ranging~(LiDAR) sensors has been increased to model environments for efficient site management. However, it is observed that sometimes LiDAR-based approaches diverge in narrow and confined environments, such as spiral stairs and corridors, caused by fixed parameters regardless of the changes in the environments. That is, the parameters of LiDAR (-inertial) odometry are mostly set for open space; thus, if the same parameters suitable for the open space are applied in a corridor-like scene, it results in divergence of odometry methods, which is referred to as \textit{degeneracy}. To tackle this degeneracy problem, we propose a robust LiDAR inertial odometry called \textit{AdaLIO}, which employs an adaptive parameter setting strategy. To this end, we first check the degeneracy by checking whether the surroundings are corridor-like environments. If so, the parameters relevant to voxelization and normal vector estimation are adaptively changed to increase the number of correspondences. As verified in a public dataset, our proposed method showed promising performance in narrow and cramped environments, avoiding the degeneracy problem.