 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePay Attention to How You Drive: Safe and Adaptive Model-Based Reinforcement Learning for Off-Road Driving
Oct 12, 2023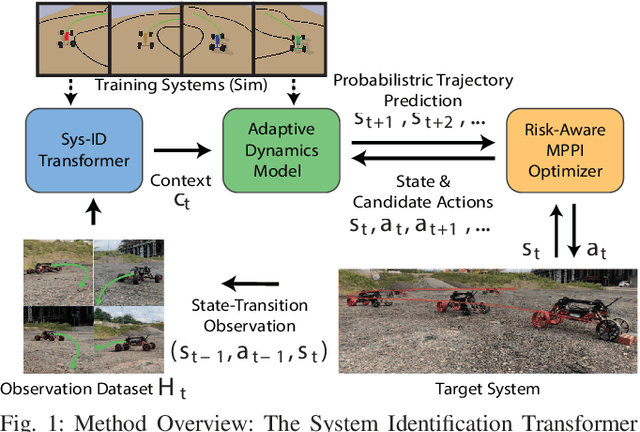
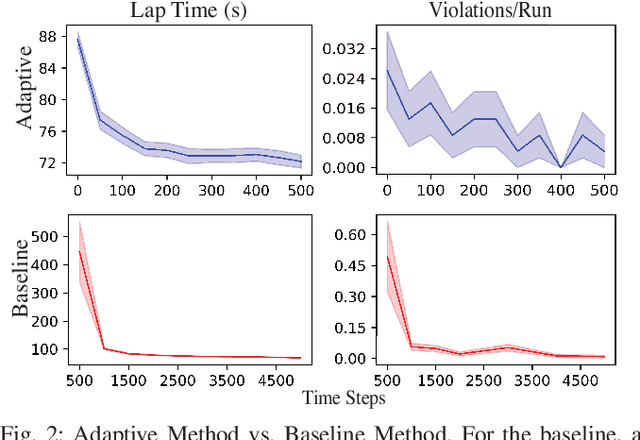
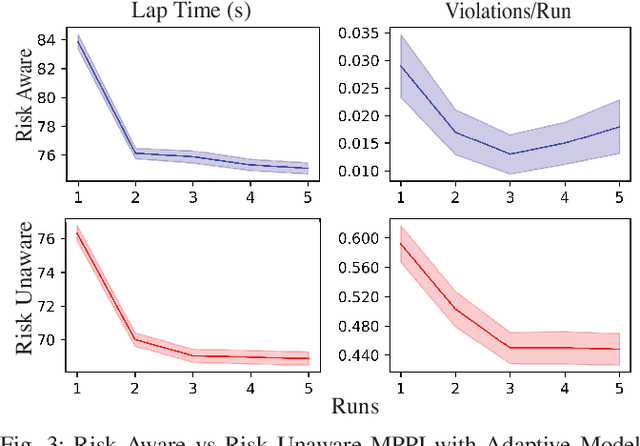
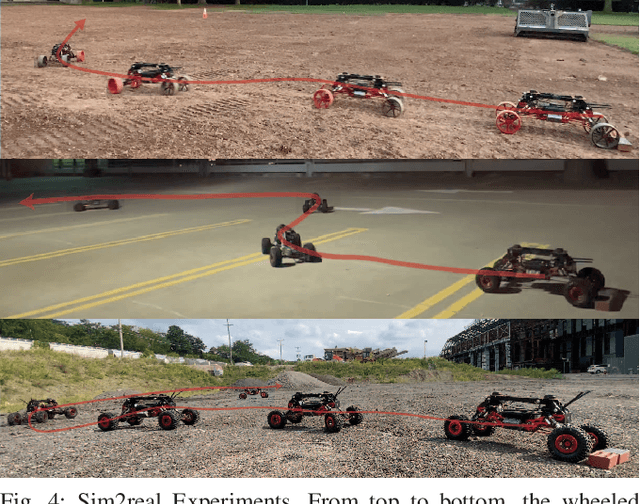
Autonomous off-road driving is challenging as risky actions taken by the robot may lead to catastrophic damage. As such, developing controllers in simulation is often desirable as it provides a safer and more economical alternative. However, accurately modeling robot dynamics is difficult due to the complex robot dynamics and terrain interactions in unstructured environments. Domain randomization addresses this problem by randomizing simulation dynamics parameters, however this approach sacrifices performance for robustness leading to policies that are sub-optimal for any target dynamics. We introduce a novel model-based reinforcement learning approach that aims to balance robustness with adaptability. Our approach trains a System Identification Transformer (SIT) and an Adaptive Dynamics Model (ADM) under a variety of simulated dynamics. The SIT uses attention mechanisms to distill state-transition observations from the target system into a context vector, which provides an abstraction for its target dynamics. Conditioned on this, the ADM probabilistically models the system's dynamics. Online, we use a Risk-Aware Model Predictive Path Integral controller (MPPI) to safely control the robot under its current understanding of the dynamics. We demonstrate in simulation as well as in multiple real-world environments that this approach enables safer behaviors upon initialization and becomes less conservative (i.e. faster) as its understanding of the target system dynamics improves with more observations. In particular, our approach results in an approximately 41% improvement in lap-time over the non-adaptive baseline while remaining safe across different environments.
TartanDrive: A Large-Scale Dataset for Learning Off-Road Dynamics Models
May 03, 2022
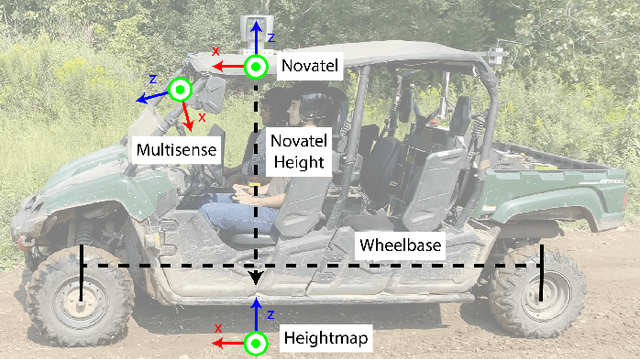
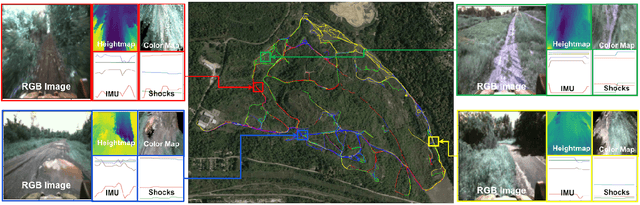
We present TartanDrive, a large scale dataset for learning dynamics models for off-road driving. We collected a dataset of roughly 200,000 off-road driving interactions on a modified Yamaha Viking ATV with seven unique sensing modalities in diverse terrains. To the authors' knowledge, this is the largest real-world multi-modal off-road driving dataset, both in terms of number of interactions and sensing modalities. We also benchmark several state-of-the-art methods for model-based reinforcement learning from high-dimensional observations on this dataset. We find that extending these models to multi-modality leads to significant performance on off-road dynamics prediction, especially in more challenging terrains. We also identify some shortcomings with current neural network architectures for the off-road driving task. Our dataset is available at https://github.com/castacks/tartan_drive.
Asynchronous and Dynamic Coverage Control Scheme for Persistent Surveillance Missions
Feb 15, 2017
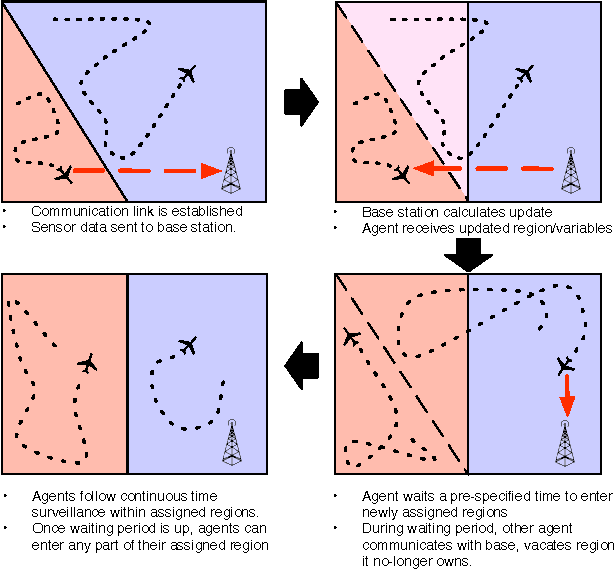
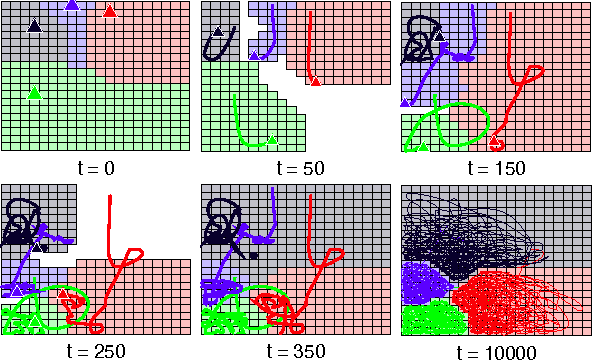

A decomposition-based coverage control scheme is proposed for multi-agent, persistent surveillance missions operating in a communication-constrained, dynamic environment. The proposed approach decouples high-level task assignment from low-level motion planning in a modular framework. Coverage assignments and surveillance parameters are managed by a central base station, and transmitted to mobile agents via unplanned and asynchronous exchanges. Coverage updates promote load balancing, while maintaining geometric and temporal characteristics that allow effective pairing with generic path planners. Namely, the proposed scheme guarantees that (i) coverage regions are connected and collectively cover the environment, (ii) subregions may only go uncovered for bounded periods of time, (iii) collisions (or sensing overlaps) are inherently avoided, and (iv) under static event likelihoods, the collective coverage regions converge to a Pareto-optimal configuration. This management scheme is then paired with a generic path planner satisfying loose assumptions. The scheme is illustrated through simulated surveillance missions.