 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHypergraph Dissimilarity Measures
Jun 15, 2021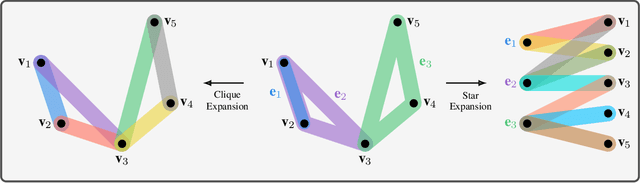
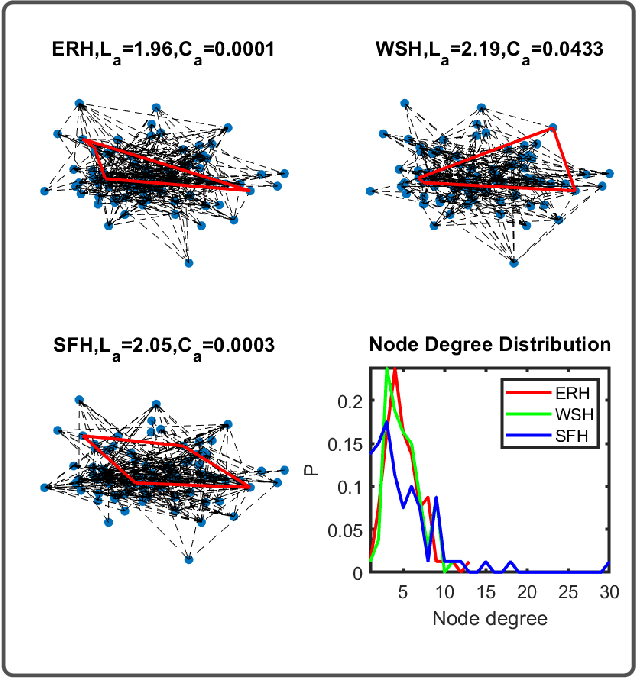
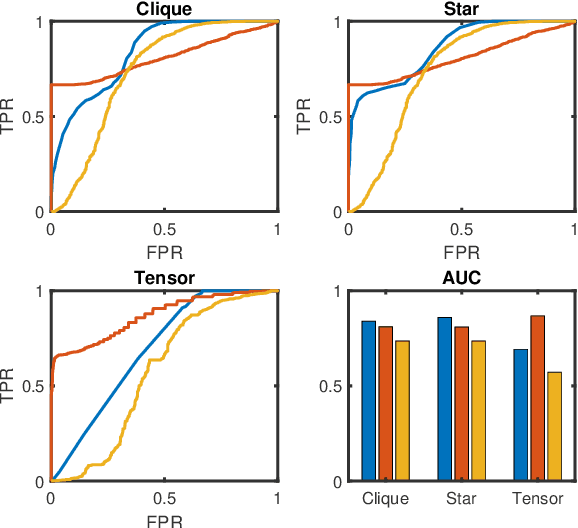
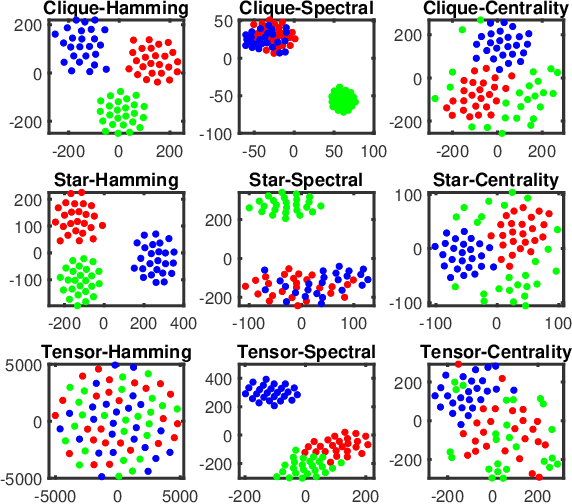
In this paper, we propose two novel approaches for hypergraph comparison. The first approach transforms the hypergraph into a graph representation for use of standard graph dissimilarity measures. The second approach exploits the mathematics of tensors to intrinsically capture multi-way relations. For each approach, we present measures that assess hypergraph dissimilarity at a specific scale or provide a more holistic multi-scale comparison. We test these measures on synthetic hypergraphs and apply them to biological datasets.
Monte Carlo Tree Search Based Tactical Maneuvering
Sep 13, 2020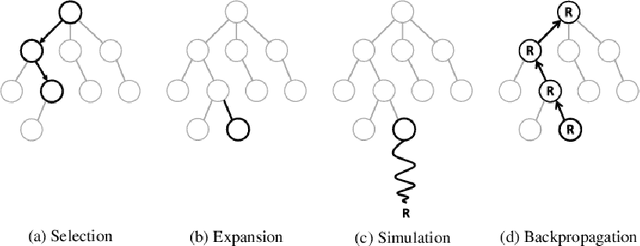
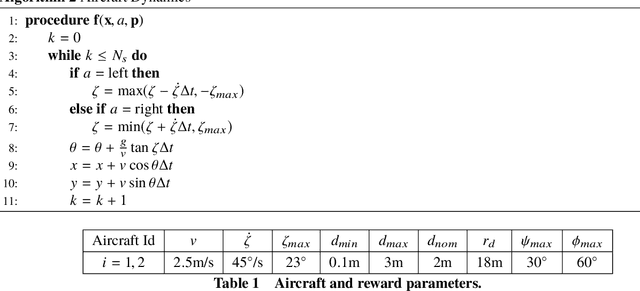
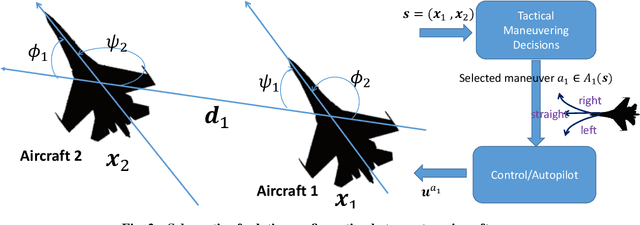

In this paper we explore the application of simultaneous move Monte Carlo Tree Search (MCTS) based online framework for tactical maneuvering between two unmanned aircrafts. Compared to other techniques, MCTS enables efficient search over long horizons and uses self-play to select best maneuver in the current state while accounting for the opponent aircraft tactics. We explore different algorithmic choices in MCTS and demonstrate the framework numerically in a simulated 2D tactical maneuvering application.
Guided Policy Search Based Control of a High Dimensional Advanced Manufacturing Process
Sep 12, 2020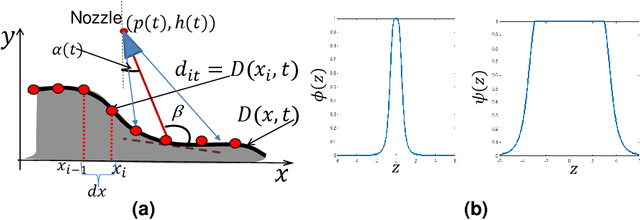
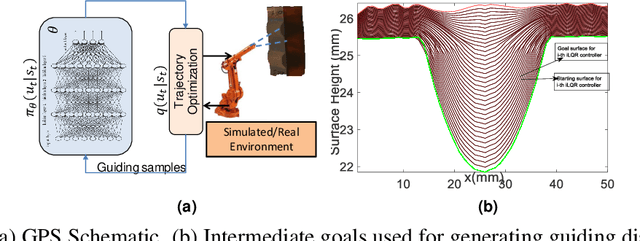


In this paper we apply guided policy search (GPS) based reinforcement learning framework for a high dimensional optimal control problem arising in an additive manufacturing process. The problem comprises of controlling the process parameters so that layer-wise deposition of material leads to desired geometric characteristics of the resulting part surface while minimizing the material deposited. A realistic simulation model of the deposition process along with carefully selected set of guiding distributions generated based on iterative Linear Quadratic Regulator is used to train a neural network policy using GPS. A closed loop control based on the trained policy and in-situ measurement of the deposition profile is tested experimentally, and shows promising performance.
UAV Surveillance Under Visibility and Dwell-Time Constraints: A Sampling-Based Approach
Aug 08, 2019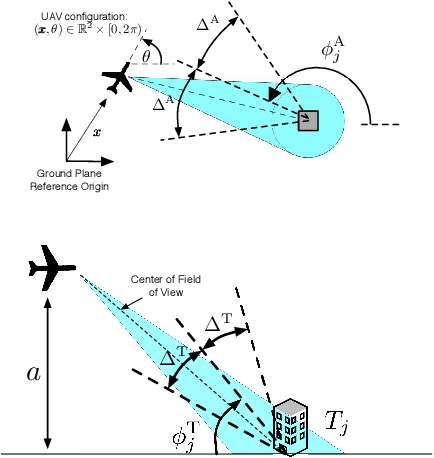
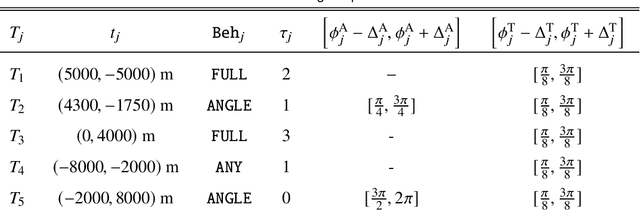
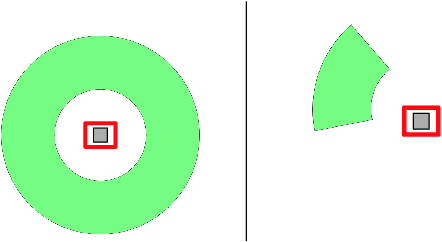
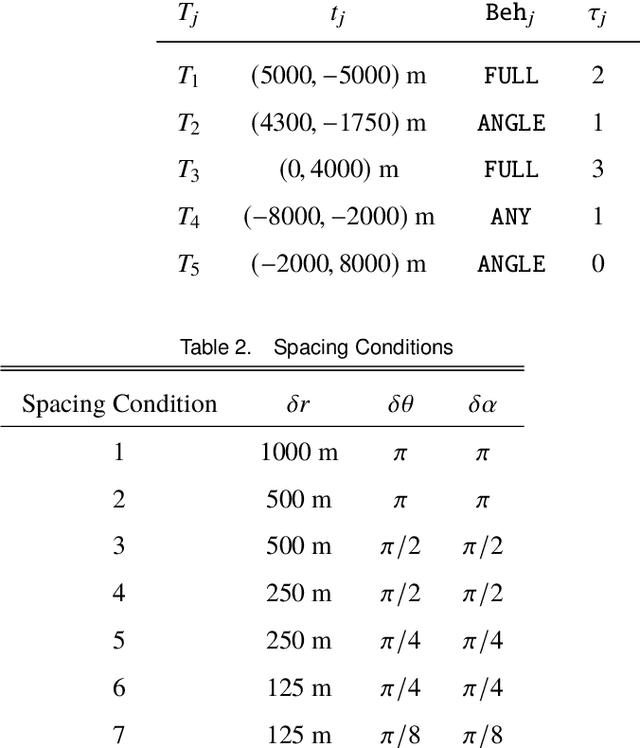
A framework is introduced for planning unmanned aerial vehicle flight paths for visual surveillance of ground targets, each having particular viewing requirements. Specifically, each target is associated with a set of imaging parameters, including a desired (i) tilt angle, (ii) azimuth, with the option of a 360-degree view, and (iii) dwell-time. Tours are sought to image the targets, while minimizing both the total mission time and the time required to reach the initial target. An epsilon-constraint scalarization is used to pose the multi-objective problem as a constrained optimization, which, through careful discretization, can be approximated as a discrete graph-search. It is shown that, in many cases, this approximation is equivalent to a generalized traveling salesperson problem. A heuristic procedure for solving the discrete approximation and recovering solutions to the full routing problem is presented, and is shown to have resolution completeness properties. Algorithms are illustrated through numerical studies.
Assessment of Faster R-CNN in Man-Machine collaborative search
Apr 04, 2019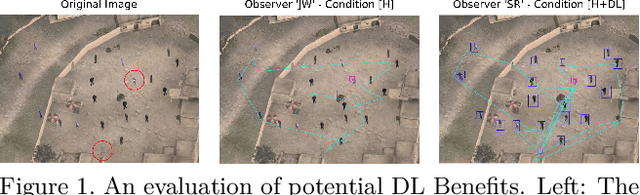
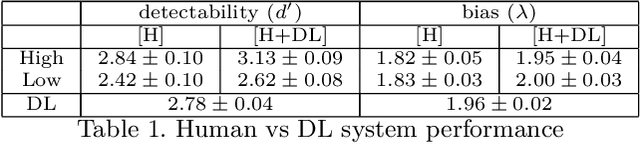


With the advent of modern expert systems driven by deep learning that supplement human experts (e.g. radiologists, dermatologists, surveillance scanners), we analyze how and when do such expert systems enhance human performance in a fine-grained small target visual search task. We set up a 2 session factorial experimental design in which humans visually search for a target with and without a Deep Learning (DL) expert system. We evaluate human changes of target detection performance and eye-movements in the presence of the DL system. We find that performance improvements with the DL system (computed via a Faster R-CNN with a VGG16) interacts with observer's perceptual abilities (e.g., sensitivity). The main results include: 1) The DL system reduces the False Alarm rate per Image on average across observer groups of both high/low sensitivity; 2) Only human observers with high sensitivity perform better than the DL system, while the low sensitivity group does not surpass individual DL system performance, even when aided with the DL system itself; 3) Increases in number of trials and decrease in viewing time were mainly driven by the DL system only for the low sensitivity group. 4) The DL system aids the human observer to fixate at a target by the 3rd fixation. These results provide insights of the benefits and limitations of deep learning systems that are collaborative or competitive with humans.
Asynchronous and Dynamic Coverage Control Scheme for Persistent Surveillance Missions
Feb 15, 2017
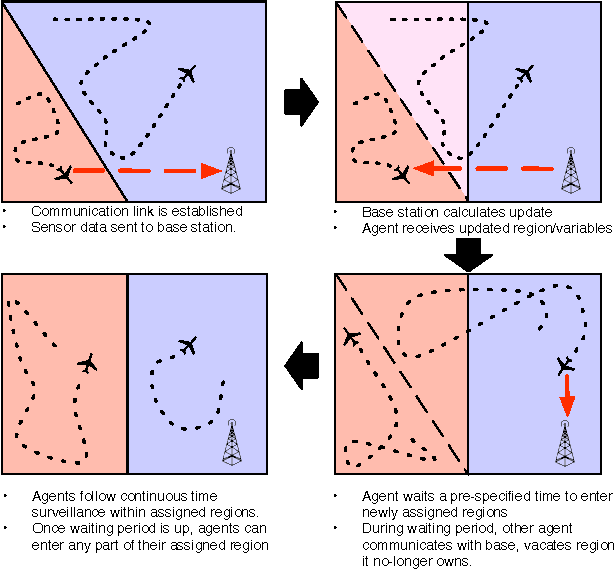

A decomposition-based coverage control scheme is proposed for multi-agent, persistent surveillance missions operating in a communication-constrained, dynamic environment. The proposed approach decouples high-level task assignment from low-level motion planning in a modular framework. Coverage assignments and surveillance parameters are managed by a central base station, and transmitted to mobile agents via unplanned and asynchronous exchanges. Coverage updates promote load balancing, while maintaining geometric and temporal characteristics that allow effective pairing with generic path planners. Namely, the proposed scheme guarantees that (i) coverage regions are connected and collectively cover the environment, (ii) subregions may only go uncovered for bounded periods of time, (iii) collisions (or sensing overlaps) are inherently avoided, and (iv) under static event likelihoods, the collective coverage regions converge to a Pareto-optimal configuration. This management scheme is then paired with a generic path planner satisfying loose assumptions. The scheme is illustrated through simulated surveillance missions.
A Chaotic Dynamical System that Paints
Apr 08, 2015
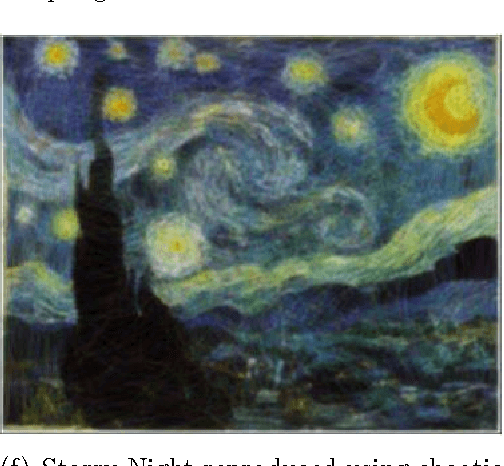
Can a dynamical system paint masterpieces such as Da Vinci's Mona Lisa or Monet's Water Lilies? Moreover, can this dynamical system be chaotic in the sense that although the trajectories are sensitive to initial conditions, the same painting is created every time? Setting aside the creative aspect of painting a picture, in this work, we develop a novel algorithm to reproduce paintings and photographs. Combining ideas from ergodic theory and control theory, we construct a chaotic dynamical system with predetermined statistical properties. If one makes the spatial distribution of colors in the picture the target distribution, akin to a human, the algorithm first captures large scale features and then goes on to refine small scale features. Beyond reproducing paintings, this approach is expected to have a wide variety of applications such as uncertainty quantification, sampling for efficient inference in scalable machine learning for big data, and developing effective strategies for search and rescue. In particular, our preliminary studies demonstrate that this algorithm provides significant acceleration and higher accuracy than competing methods for Markov Chain Monte Carlo (MCMC).
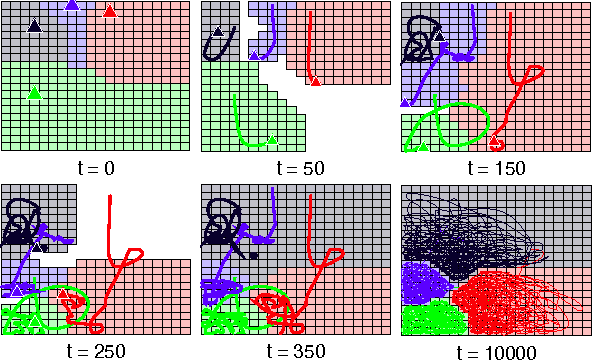
Mixed Human-Robot Team Surveillance
Nov 12, 2013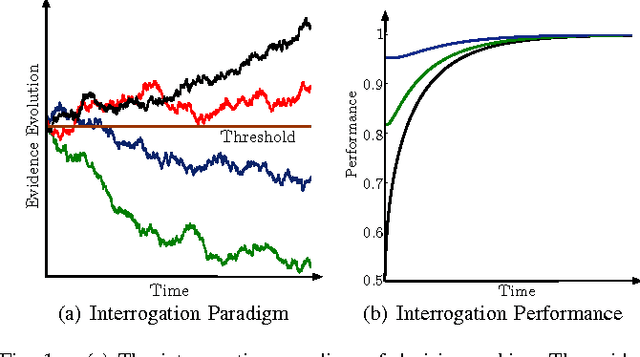
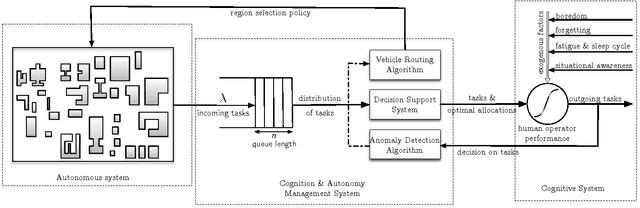
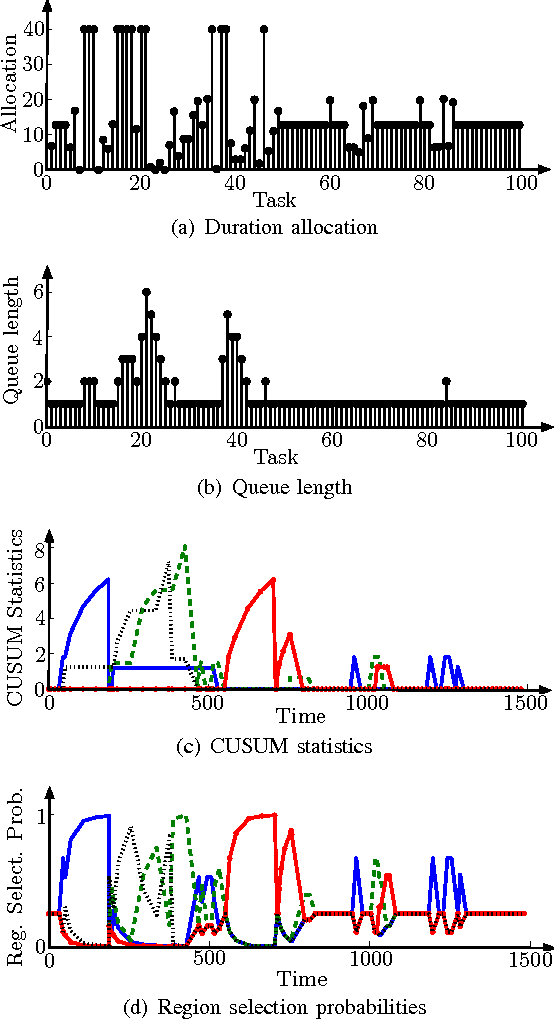
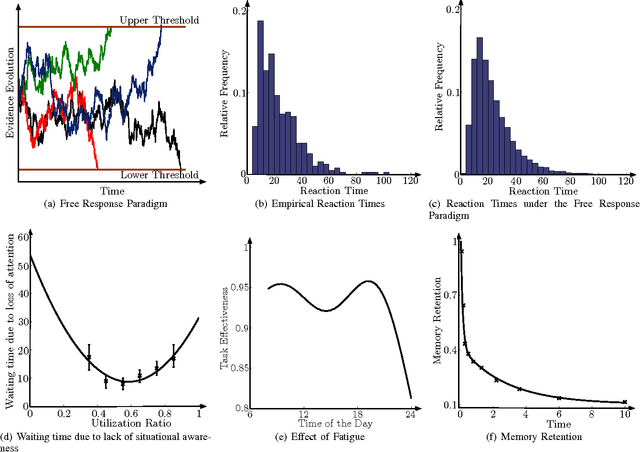
We study the mixed human-robot team design in a system theoretic setting using the context of a surveillance mission. The three key coupled components of a mixed team design are (i) policies for the human operator, (ii) policies to account for erroneous human decisions, and (iii) policies to control the automaton. In this paper, we survey elements of human decision-making, including evidence aggregation, situational awareness, fatigue, and memory effects. We bring together the models for these elements in human decision-making to develop a single coherent model for human decision-making in a two-alternative choice task. We utilize the developed model to design efficient attention allocation policies for the human operator. We propose an anomaly detection algorithm that utilizes potentially erroneous decision by the operator to ascertain an anomalous region among the set of regions surveilled. Finally, we propose a stochastic vehicle routing policy that surveils an anomalous region with high probability. Our mixed team design relies on the certainty-equivalent receding-horizon control framework.
Universal and Composite Hypothesis Testing via Mismatched Divergence
Sep 09, 2010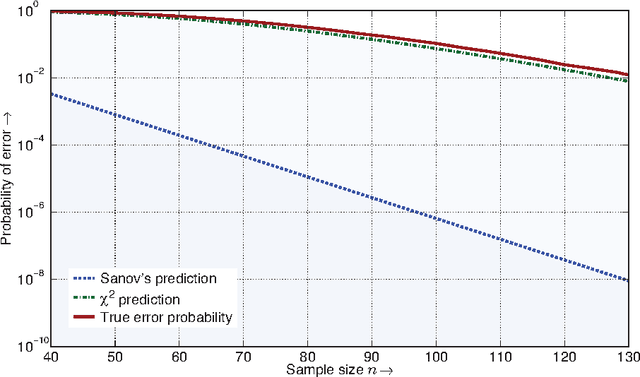
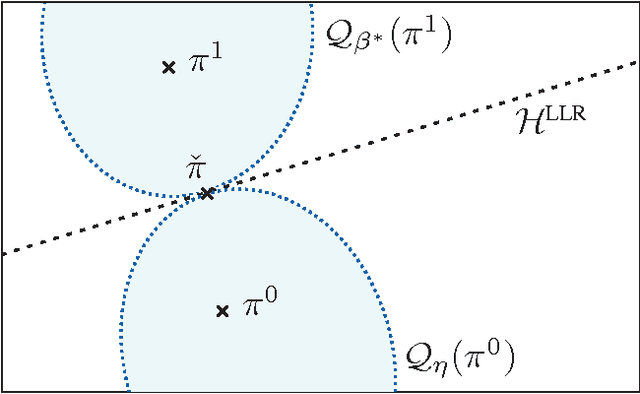
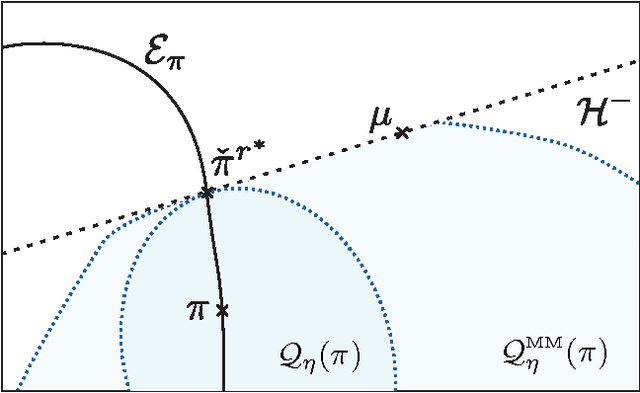
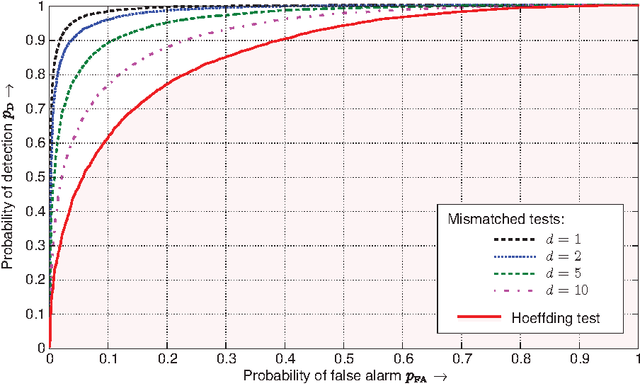
For the universal hypothesis testing problem, where the goal is to decide between the known null hypothesis distribution and some other unknown distribution, Hoeffding proposed a universal test in the nineteen sixties. Hoeffding's universal test statistic can be written in terms of Kullback-Leibler (K-L) divergence between the empirical distribution of the observations and the null hypothesis distribution. In this paper a modification of Hoeffding's test is considered based on a relaxation of the K-L divergence test statistic, referred to as the mismatched divergence. The resulting mismatched test is shown to be a generalized likelihood-ratio test (GLRT) for the case where the alternate distribution lies in a parametric family of the distributions characterized by a finite dimensional parameter, i.e., it is a solution to the corresponding composite hypothesis testing problem. For certain choices of the alternate distribution, it is shown that both the Hoeffding test and the mismatched test have the same asymptotic performance in terms of error exponents. A consequence of this result is that the GLRT is optimal in differentiating a particular distribution from others in an exponential family. It is also shown that the mismatched test has a significant advantage over the Hoeffding test in terms of finite sample size performance. This advantage is due to the difference in the asymptotic variances of the two test statistics under the null hypothesis. In particular, the variance of the K-L divergence grows linearly with the alphabet size, making the test impractical for applications involving large alphabet distributions. The variance of the mismatched divergence on the other hand grows linearly with the dimension of the parameter space, and can hence be controlled through a prudent choice of the function class defining the mismatched divergence.