 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHALO: Fault-Tolerant Safety Architecture For High-Speed Autonomous Racing
Mar 13, 2025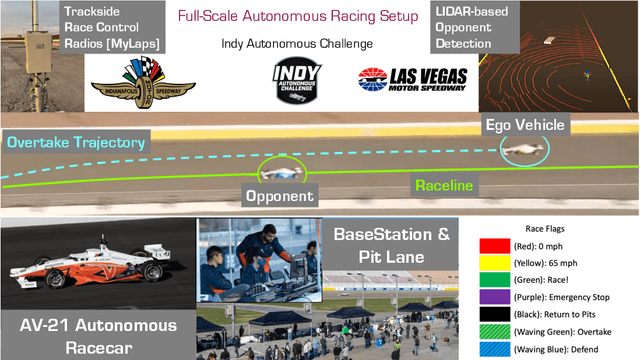

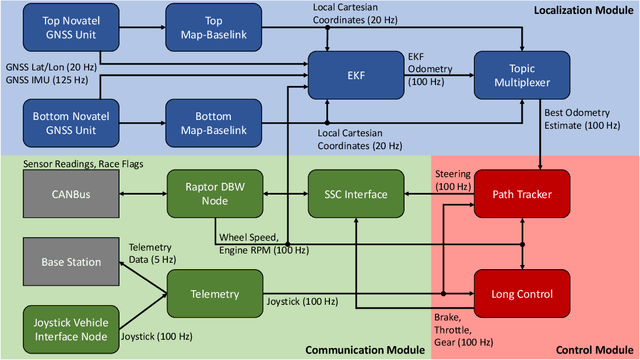
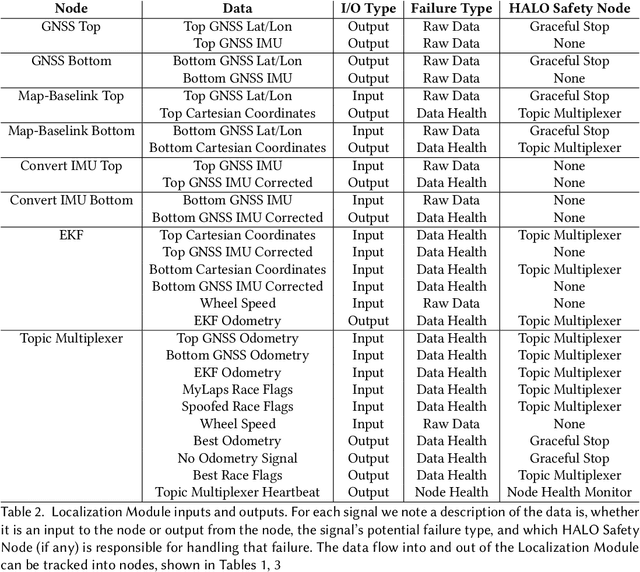
The field of high-speed autonomous racing has seen significant advances in recent years, with the rise of competitions such as RoboRace and the Indy Autonomous Challenge providing a platform for researchers to develop software stacks for autonomous race vehicles capable of reaching speeds in excess of 170 mph. Ensuring the safety of these vehicles requires the software to continuously monitor for different faults and erroneous operating conditions during high-speed operation, with the goal of mitigating any unreasonable risks posed by malfunctions in sub-systems and components. This paper presents a comprehensive overview of the HALO safety architecture, which has been implemented on a full-scale autonomous racing vehicle as part of the Indy Autonomous Challenge. The paper begins with a failure mode and criticality analysis of the perception, planning, control, and communication modules of the software stack. Specifically, we examine three different types of faults - node health, data health, and behavioral-safety faults. To mitigate these faults, the paper then outlines HALO safety archetypes and runtime monitoring methods. Finally, the paper demonstrates the effectiveness of the HALO safety architecture for each of the faults, through real-world data gathered from autonomous racing vehicle trials during multi-agent scenarios.
CRASH: Challenging Reinforcement-Learning Based Adversarial Scenarios For Safety Hardening
Nov 26, 2024



Ensuring the safety of autonomous vehicles (AVs) requires identifying rare but critical failure cases that on-road testing alone cannot discover. High-fidelity simulations provide a scalable alternative, but automatically generating realistic and diverse traffic scenarios that can effectively stress test AV motion planners remains a key challenge. This paper introduces CRASH - Challenging Reinforcement-learning based Adversarial scenarios for Safety Hardening - an adversarial deep reinforcement learning framework to address this issue. First CRASH can control adversarial Non Player Character (NPC) agents in an AV simulator to automatically induce collisions with the Ego vehicle, falsifying its motion planner. We also propose a novel approach, that we term safety hardening, which iteratively refines the motion planner by simulating improvement scenarios against adversarial agents, leveraging the failure cases to strengthen the AV stack. CRASH is evaluated on a simplified two-lane highway scenario, demonstrating its ability to falsify both rule-based and learning-based planners with collision rates exceeding 90%. Additionally, safety hardening reduces the Ego vehicle's collision rate by 26%. While preliminary, these results highlight RL-based safety hardening as a promising approach for scenario-driven simulation testing for autonomous vehicles.
RACECAR -- The Dataset for High-Speed Autonomous Racing
Jun 05, 2023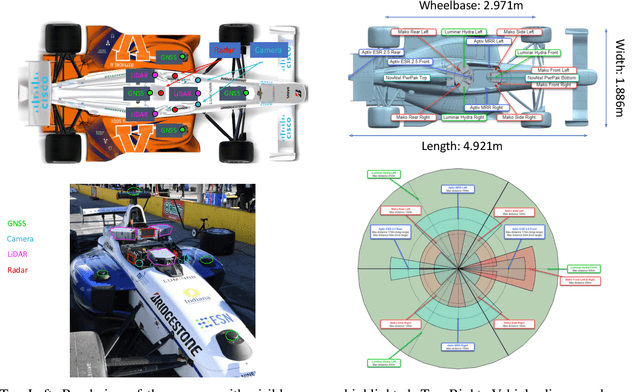
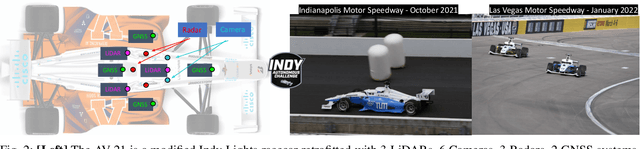
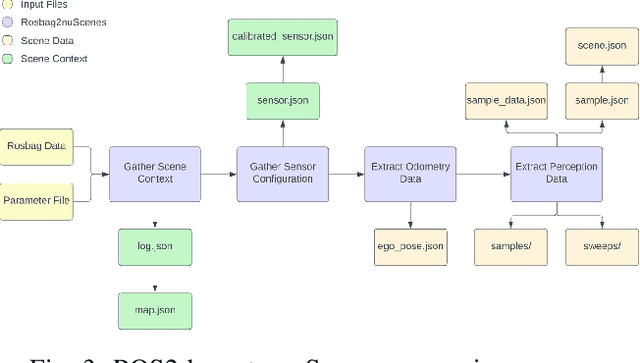
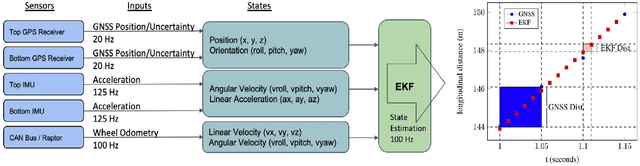
This paper describes the first open dataset for full-scale and high-speed autonomous racing. Multi-modal sensor data has been collected from fully autonomous Indy race cars operating at speeds of up to 170 mph (273 kph). Six teams who raced in the Indy Autonomous Challenge have contributed to this dataset. The dataset spans 11 interesting racing scenarios across two race tracks which include solo laps, multi-agent laps, overtaking situations, high-accelerations, banked tracks, obstacle avoidance, pit entry and exit at different speeds. The dataset contains data from 27 racing sessions across the 11 scenarios with over 6.5 hours of sensor data recorded from the track. The data is organized and released in both ROS2 and nuScenes format. We have also developed the ROS2-to-nuScenes conversion library to achieve this. The RACECAR data is unique because of the high-speed environment of autonomous racing. We present several benchmark problems on localization, object detection and tracking (LiDAR, Radar, and Camera), and mapping using the RACECAR data to explore issues that arise at the limits of operation of the vehicle.