 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Dynamics: Vehicle Dynamics Modeling with a Physics-Informed Neural Network for Autonomous Racing
Dec 07, 2023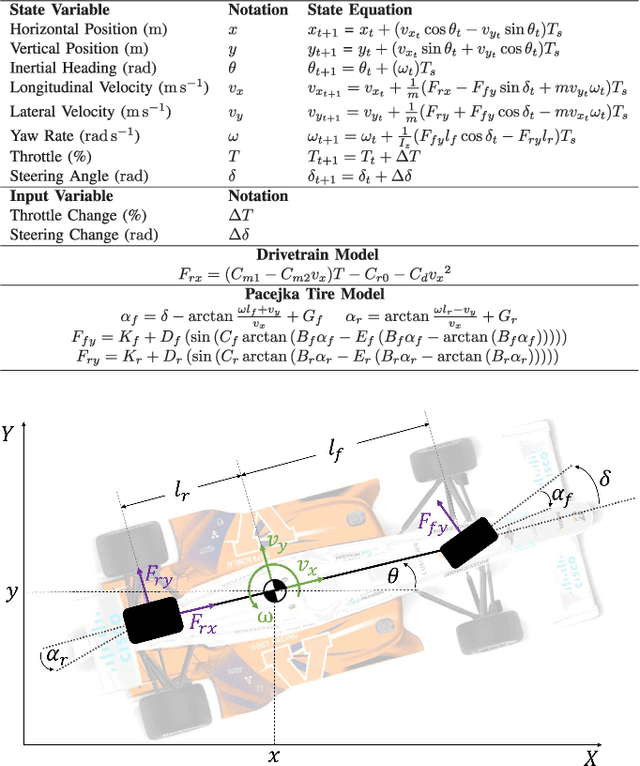
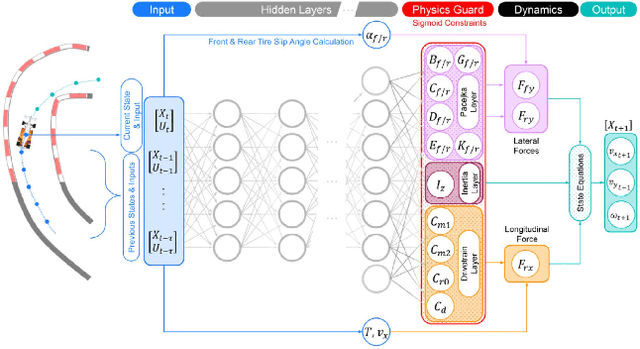
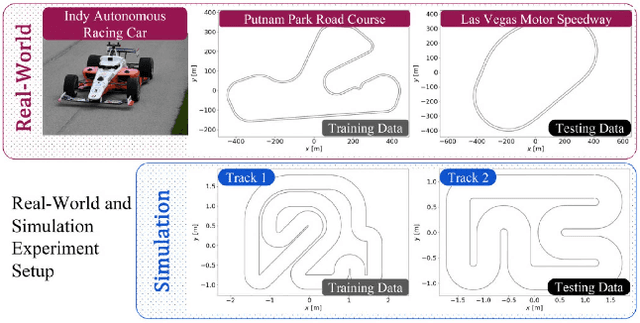
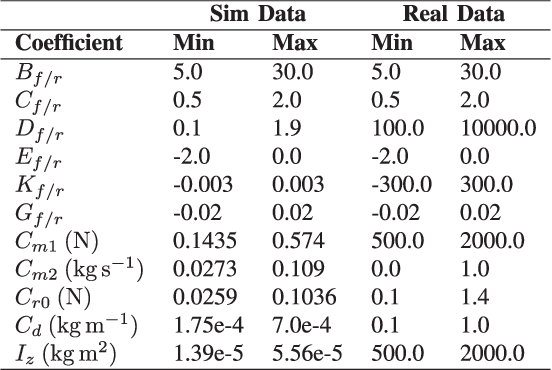
Autonomous racing is a critical research area for autonomous driving, presenting significant challenges in vehicle dynamics modeling, such as balancing model precision and computational efficiency at high speeds (>280kmph), where minor errors in modeling have severe consequences. Existing physics-based models for vehicle dynamics require elaborate testing setups and tuning, which are hard to implement, time-intensive, and cost-prohibitive. Conversely, purely data-driven approaches do not generalize well and cannot adequately ensure physical constraints on predictions. This paper introduces Deep Dynamics, a physics-informed neural network (PINN) for vehicle dynamics modeling of an autonomous racecar. It combines physics coefficient estimation and dynamical equations to accurately predict vehicle states at high speeds and includes a unique Physics Guard layer to ensure internal coefficient estimates remain within their nominal physical ranges. Open-loop and closed-loop performance assessments, using a physics-based simulator and full-scale autonomous Indy racecar data, highlight Deep Dynamics as a promising approach for modeling racecar vehicle dynamics.
RACECAR -- The Dataset for High-Speed Autonomous Racing
Jun 05, 2023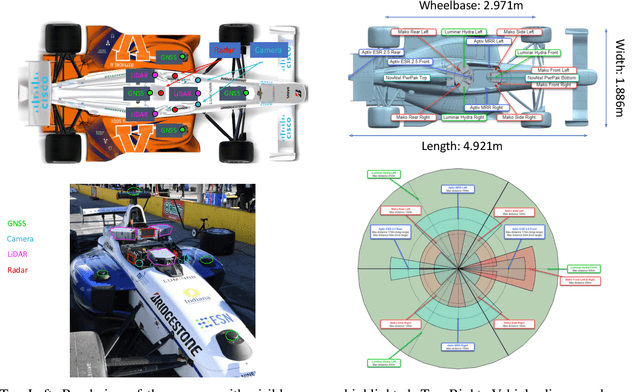
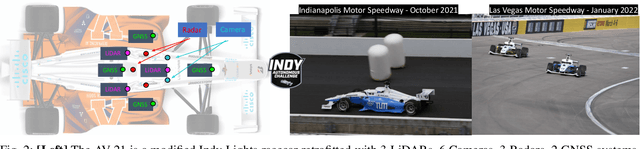
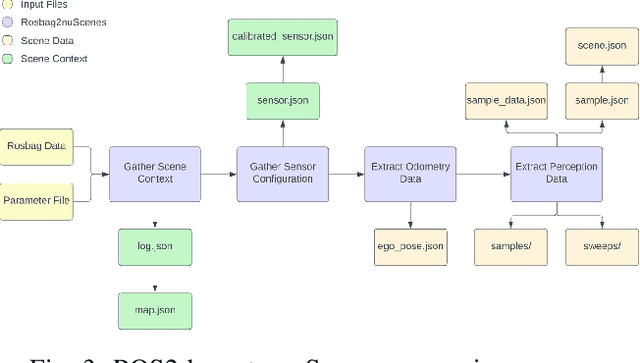
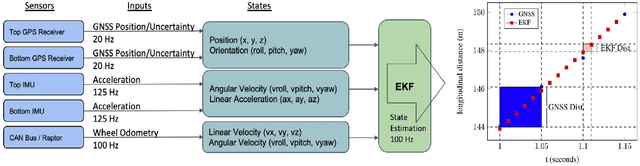
This paper describes the first open dataset for full-scale and high-speed autonomous racing. Multi-modal sensor data has been collected from fully autonomous Indy race cars operating at speeds of up to 170 mph (273 kph). Six teams who raced in the Indy Autonomous Challenge have contributed to this dataset. The dataset spans 11 interesting racing scenarios across two race tracks which include solo laps, multi-agent laps, overtaking situations, high-accelerations, banked tracks, obstacle avoidance, pit entry and exit at different speeds. The dataset contains data from 27 racing sessions across the 11 scenarios with over 6.5 hours of sensor data recorded from the track. The data is organized and released in both ROS2 and nuScenes format. We have also developed the ROS2-to-nuScenes conversion library to achieve this. The RACECAR data is unique because of the high-speed environment of autonomous racing. We present several benchmark problems on localization, object detection and tracking (LiDAR, Radar, and Camera), and mapping using the RACECAR data to explore issues that arise at the limits of operation of the vehicle.