 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTarget Tracking via LiDAR-RADAR Sensor Fusion for Autonomous Racing
May 26, 2025High Speed multi-vehicle Autonomous Racing will increase the safety and performance of road-going Autonomous Vehicles. Precise vehicle detection and dynamics estimation from a moving platform is a key requirement for planning and executing complex autonomous overtaking maneuvers. To address this requirement, we have developed a Latency-Aware EKF-based Multi Target Tracking algorithm fusing LiDAR and RADAR measurements. The algorithm explots the different sensor characteristics by explicitly integrating the Range Rate in the EKF Measurement Function, as well as a-priori knowledge of the racetrack during state prediction. It can handle Out-Of-Sequence Measurements via Reprocessing using a double State and Measurement Buffer, ensuring sensor delay compensation with no information loss. This algorithm has been implemented on Team PoliMOVE's autonomous racecar, and was proved experimentally by completing a number of fully autonomous overtaking maneuvers at speeds up to 275 km/h.
LiDAR-Based Vehicle Detection and Tracking for Autonomous Racing
Jan 24, 2025Autonomous racing provides a controlled environment for testing the software and hardware of autonomous vehicles operating at their performance limits. Competitive interactions between multiple autonomous racecars however introduce challenging and potentially dangerous scenarios. Accurate and consistent vehicle detection and tracking is crucial for overtaking maneuvers, and low-latency sensor processing is essential to respond quickly to hazardous situations. This paper presents the LiDAR-based perception algorithms deployed on Team PoliMOVE's autonomous racecar, which won multiple competitions in the Indy Autonomous Challenge series. Our Vehicle Detection and Tracking pipeline is composed of a novel fast Point Cloud Segmentation technique and a specific Vehicle Pose Estimation methodology, together with a variable-step Multi-Target Tracking algorithm. Experimental results demonstrate the algorithm's performance, robustness, computational efficiency, and suitability for autonomous racing applications, enabling fully autonomous overtaking maneuvers at velocities exceeding 275 km/h.
Vehicle Fuel Consumption Virtual Sensing from GNSS and IMU Measurements
Oct 02, 2023



This paper presents a vehicle-independent, non-intrusive, and light monitoring system for accurately measuring fuel consumption in road vehicles from longitudinal speed and acceleration derived continuously in time from GNSS and IMU sensors mounted inside the vehicle. In parallel to boosting the transition to zero-carbon cars, there is an increasing interest in low-cost instruments for precise measurement of the environmental impact of the many internal combustion engine vehicles still in circulation. The main contribution of this work is the design and comparison of two innovative black-box algorithms, one based on a reduced complexity physics modeling while the other relying on a feedforward neural network for black-box fuel consumption estimation using only velocity and acceleration measurements. Based on suitable metrics, the developed algorithms outperform the state of the art best approach, both in the instantaneous and in the integral fuel consumption estimation, with errors smaller than 1\% with respect to the fuel flow ground truth. The data used for model identification, testing, and experimental validation is composed of GNSS velocity and IMU acceleration measurements collected during several trips using a diesel fuel vehicle on different roads, in different seasons, and with varying numbers of passengers. Compared to built-in vehicle monitoring systems, this methodology is not customized, uses off-the-shelf sensors, and is based on two simple algorithms that have been validated offline and could be easily implemented in a real-time environment.
RACECAR -- The Dataset for High-Speed Autonomous Racing
Jun 05, 2023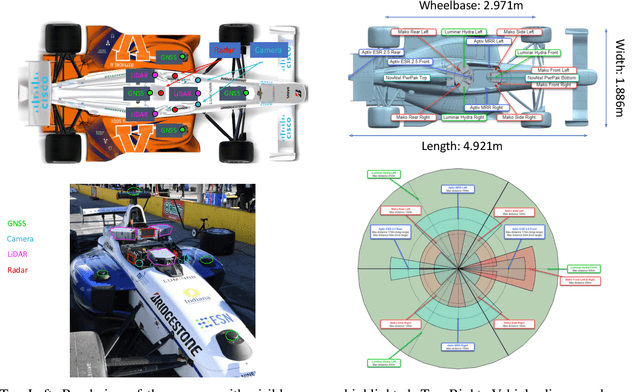
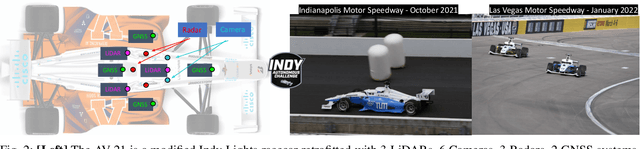
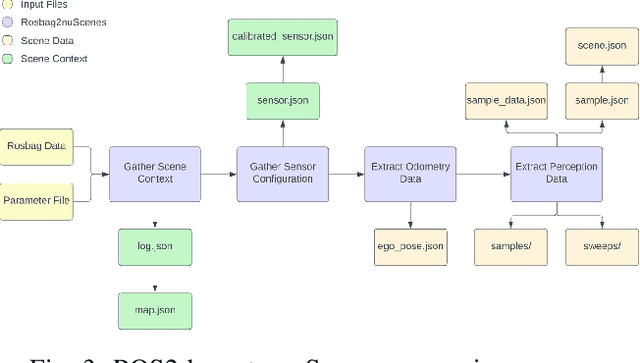
This paper describes the first open dataset for full-scale and high-speed autonomous racing. Multi-modal sensor data has been collected from fully autonomous Indy race cars operating at speeds of up to 170 mph (273 kph). Six teams who raced in the Indy Autonomous Challenge have contributed to this dataset. The dataset spans 11 interesting racing scenarios across two race tracks which include solo laps, multi-agent laps, overtaking situations, high-accelerations, banked tracks, obstacle avoidance, pit entry and exit at different speeds. The dataset contains data from 27 racing sessions across the 11 scenarios with over 6.5 hours of sensor data recorded from the track. The data is organized and released in both ROS2 and nuScenes format. We have also developed the ROS2-to-nuScenes conversion library to achieve this. The RACECAR data is unique because of the high-speed environment of autonomous racing. We present several benchmark problems on localization, object detection and tracking (LiDAR, Radar, and Camera), and mapping using the RACECAR data to explore issues that arise at the limits of operation of the vehicle.