 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Fuel Consumption Virtual Sensing from GNSS and IMU Measurements
Oct 02, 2023



This paper presents a vehicle-independent, non-intrusive, and light monitoring system for accurately measuring fuel consumption in road vehicles from longitudinal speed and acceleration derived continuously in time from GNSS and IMU sensors mounted inside the vehicle. In parallel to boosting the transition to zero-carbon cars, there is an increasing interest in low-cost instruments for precise measurement of the environmental impact of the many internal combustion engine vehicles still in circulation. The main contribution of this work is the design and comparison of two innovative black-box algorithms, one based on a reduced complexity physics modeling while the other relying on a feedforward neural network for black-box fuel consumption estimation using only velocity and acceleration measurements. Based on suitable metrics, the developed algorithms outperform the state of the art best approach, both in the instantaneous and in the integral fuel consumption estimation, with errors smaller than 1\% with respect to the fuel flow ground truth. The data used for model identification, testing, and experimental validation is composed of GNSS velocity and IMU acceleration measurements collected during several trips using a diesel fuel vehicle on different roads, in different seasons, and with varying numbers of passengers. Compared to built-in vehicle monitoring systems, this methodology is not customized, uses off-the-shelf sensors, and is based on two simple algorithms that have been validated offline and could be easily implemented in a real-time environment.
Analysis and development of a novel algorithm for the in-vehicle hand-usage of a smartphone
Aug 30, 2018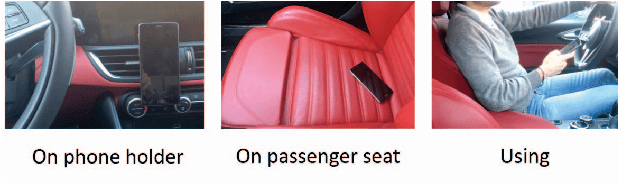
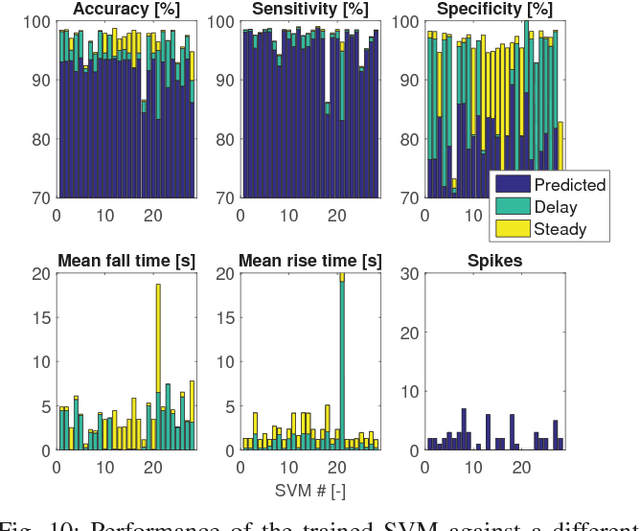
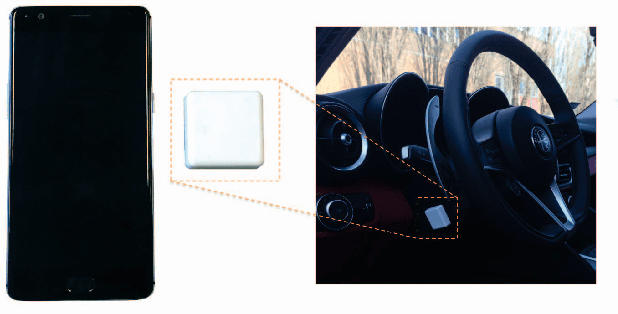
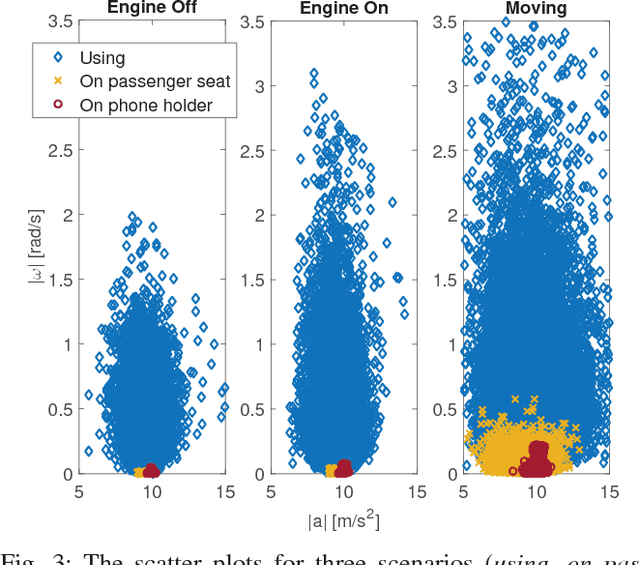
Smartphone usage while driving is unanimously considered to be a really dangerous habit due to strong correlation with road accidents. In this paper, the problem of detecting whether the driver is using the phone during a trip is addressed. To do this, high-frequency data from the triaxial inertial measurement unit (IMU) integrated in almost all modern phone is processed without relying on external inputs so as to provide a self-contained approach. By resorting to a frequency-domain analysis, it is possible to extract from the raw signals the useful information needed to detect when the driver is using the phone, without being affected by the effects that vehicle motion has on the same signals. The selected features are used to train a Support Vector Machine (SVM) algorithm. The performance of the proposed approach are analyzed and tested on experimental data collected during mixed naturalistic driving scenarios, proving the effectiveness of the proposed approach.