 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLCF3D: A Robust and Real-Time Late-Cascade Fusion Framework for 3D Object Detection in Autonomous Driving
Jan 14, 2026Accurately localizing 3D objects like pedestrians, cyclists, and other vehicles is essential in Autonomous Driving. To ensure high detection performance, Autonomous Vehicles complement RGB cameras with LiDAR sensors, but effectively combining these data sources for 3D object detection remains challenging. We propose LCF3D, a novel sensor fusion framework that combines a 2D object detector on RGB images with a 3D object detector on LiDAR point clouds. By leveraging multimodal fusion principles, we compensate for inaccuracies in the LiDAR object detection network. Our solution combines two key principles: (i) late fusion, to reduce LiDAR False Positives by matching LiDAR 3D detections with RGB 2D detections and filtering out unmatched LiDAR detections; and (ii) cascade fusion, to recover missed objects from LiDAR by generating new 3D frustum proposals corresponding to unmatched RGB detections. Experiments show that LCF3D is beneficial for domain generalization, as it turns out to be successful in handling different sensor configurations between training and testing domains. LCF3D achieves significant improvements over LiDAR-based methods, particularly for challenging categories like pedestrians and cyclists in the KITTI dataset, as well as motorcycles and bicycles in nuScenes. Code can be downloaded from: https://github.com/CarloSgaravatti/LCF3D.
Target Tracking via LiDAR-RADAR Sensor Fusion for Autonomous Racing
May 26, 2025High Speed multi-vehicle Autonomous Racing will increase the safety and performance of road-going Autonomous Vehicles. Precise vehicle detection and dynamics estimation from a moving platform is a key requirement for planning and executing complex autonomous overtaking maneuvers. To address this requirement, we have developed a Latency-Aware EKF-based Multi Target Tracking algorithm fusing LiDAR and RADAR measurements. The algorithm explots the different sensor characteristics by explicitly integrating the Range Rate in the EKF Measurement Function, as well as a-priori knowledge of the racetrack during state prediction. It can handle Out-Of-Sequence Measurements via Reprocessing using a double State and Measurement Buffer, ensuring sensor delay compensation with no information loss. This algorithm has been implemented on Team PoliMOVE's autonomous racecar, and was proved experimentally by completing a number of fully autonomous overtaking maneuvers at speeds up to 275 km/h.
A Multimodal Hybrid Late-Cascade Fusion Network for Enhanced 3D Object Detection
Apr 25, 2025



We present a new way to detect 3D objects from multimodal inputs, leveraging both LiDAR and RGB cameras in a hybrid late-cascade scheme, that combines an RGB detection network and a 3D LiDAR detector. We exploit late fusion principles to reduce LiDAR False Positives, matching LiDAR detections with RGB ones by projecting the LiDAR bounding boxes on the image. We rely on cascade fusion principles to recover LiDAR False Negatives leveraging epipolar constraints and frustums generated by RGB detections of separate views. Our solution can be plugged on top of any underlying single-modal detectors, enabling a flexible training process that can take advantage of pre-trained LiDAR and RGB detectors, or train the two branches separately. We evaluate our results on the KITTI object detection benchmark, showing significant performance improvements, especially for the detection of Pedestrians and Cyclists.
LiDAR-Based Vehicle Detection and Tracking for Autonomous Racing
Jan 24, 2025Autonomous racing provides a controlled environment for testing the software and hardware of autonomous vehicles operating at their performance limits. Competitive interactions between multiple autonomous racecars however introduce challenging and potentially dangerous scenarios. Accurate and consistent vehicle detection and tracking is crucial for overtaking maneuvers, and low-latency sensor processing is essential to respond quickly to hazardous situations. This paper presents the LiDAR-based perception algorithms deployed on Team PoliMOVE's autonomous racecar, which won multiple competitions in the Indy Autonomous Challenge series. Our Vehicle Detection and Tracking pipeline is composed of a novel fast Point Cloud Segmentation technique and a specific Vehicle Pose Estimation methodology, together with a variable-step Multi-Target Tracking algorithm. Experimental results demonstrate the algorithm's performance, robustness, computational efficiency, and suitability for autonomous racing applications, enabling fully autonomous overtaking maneuvers at velocities exceeding 275 km/h.
Learning-Based On-Track System Identification for Scaled Autonomous Racing in Under a Minute
Nov 26, 2024



Accurate tire modeling is crucial for optimizing autonomous racing vehicles, as state-of-the-art (SotA) model-based techniques rely on precise knowledge of the vehicle's parameters. Yet, system identification in dynamic racing conditions is challenging due to varying track and tire conditions. Traditional methods require extensive operational ranges, often impractical in racing scenarios. Machine learning (ML)-based methods, while improving performance, struggle with generalization and depend on accurate initialization. This paper introduces a novel on-track system identification algorithm, incorporating a neural network (NN) for error correction, which is then employed for traditional system identification with virtually generated data. Crucially, the process is iteratively reapplied, with tire parameters updated at each cycle, leading to notable improvements in accuracy in tests on a scaled vehicle. Experiments show that it is possible to learn a tire model without prior knowledge with only 30 seconds of driving data and 3 seconds of training time. This method demonstrates greater one-step prediction accuracy than the baseline nonlinear least squares (NLS) method under noisy conditions, achieving a 3.3x lower root mean square error (RMSE), and yields tire models with comparable accuracy to traditional steady-state system identification. Furthermore, unlike steady-state methods requiring large spaces and specific experimental setups, the proposed approach identifies tire parameters directly on a race track in dynamic racing environments.
Hybrid Imitation-Learning Motion Planner for Urban Driving
Sep 04, 2024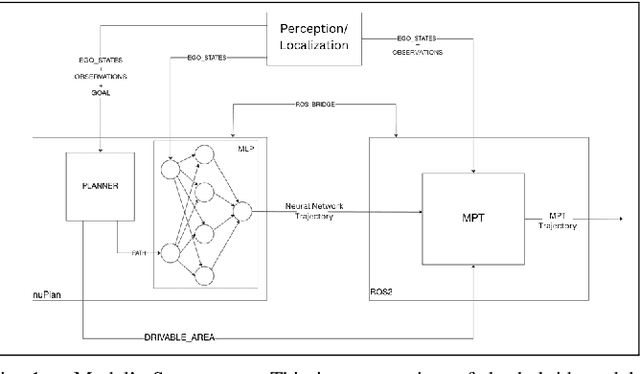
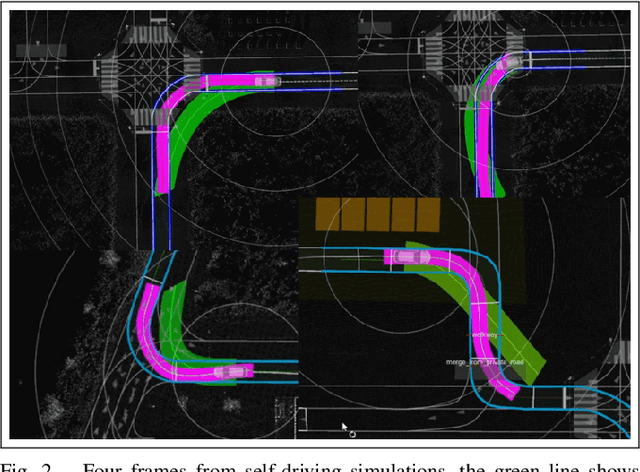
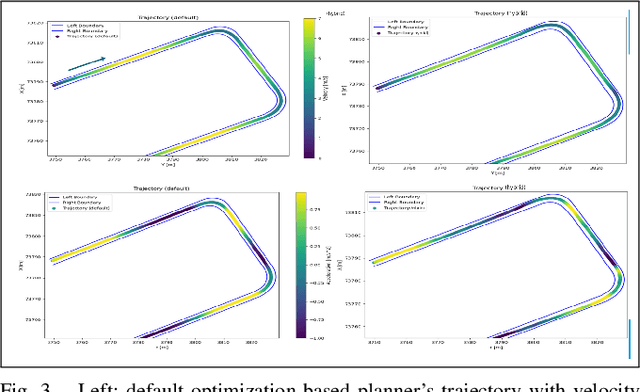
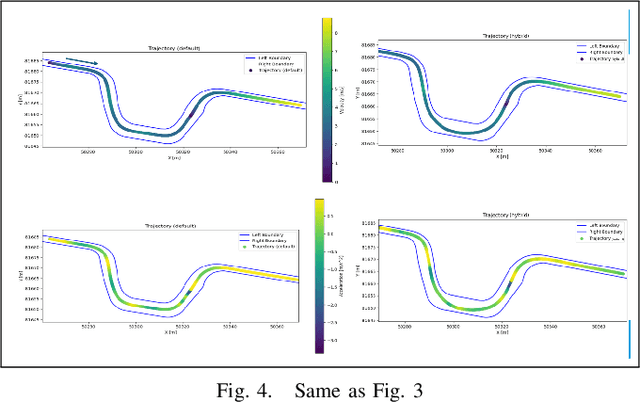
With the release of open source datasets such as nuPlan and Argoverse, the research around learning-based planners has spread a lot in the last years. Existing systems have shown excellent capabilities in imitating the human driver behaviour, but they struggle to guarantee safe closed-loop driving. Conversely, optimization-based planners offer greater security in short-term planning scenarios. To confront this challenge, in this paper we propose a novel hybrid motion planner that integrates both learning-based and optimization-based techniques. Initially, a multilayer perceptron (MLP) generates a human-like trajectory, which is then refined by an optimization-based component. This component not only minimizes tracking errors but also computes a trajectory that is both kinematically feasible and collision-free with obstacles and road boundaries. Our model effectively balances safety and human-likeness, mitigating the trade-off inherent in these objectives. We validate our approach through simulation experiments and further demonstrate its efficacy by deploying it in real-world self-driving vehicles.
Mobile Robot Localization: a Modular, Odometry-Improving Approach
Mar 20, 2024Despite the number of works published in recent years, vehicle localization remains an open, challenging problem. While map-based localization and SLAM algorithms are getting better and better, they remain a single point of failure in typical localization pipelines. This paper proposes a modular localization architecture that fuses sensor measurements with the outputs of off-the-shelf localization algorithms. The fusion filter estimates model uncertainties to improve odometry in case absolute pose measurements are lost entirely. The architecture is validated experimentally on a real robot navigating autonomously proving a reduction of the position error of more than 90% with respect to the odometrical estimate without uncertainty estimation in a two-minute navigation period without position measurements.
Automatic Navigation Map Generation for Mobile Robots in Urban Environments
Mar 20, 2024A fundamental prerequisite for safe and efficient navigation of mobile robots is the availability of reliable navigation maps upon which trajectories can be planned. With the increasing industrial interest in mobile robotics, especially in urban environments, the process of generating navigation maps has become of particular interest, being a labor intensive step of the deployment process. Automating this step is challenging and becomes even more arduous when the perception capabilities are limited by cost considerations. This paper proposes an algorithm to automatically generate navigation maps using a typical navigation-oriented sensor setup: a single top-mounted 3D LiDAR sensor. The proposed method is designed and validated with the urban environment as the main use case: it is shown to be able to produce accurate maps featuring different terrain types, positive obstacles of different heights as well as negative obstacles. The algorithm is applied to data collected in a typical urban environment with a wheeled inverted pendulum robot, showing its robustness against localization, perception and dynamic uncertainties. The generated map is validated against a human-made map.
Multi-Object Tracking with Camera-LiDAR Fusion for Autonomous Driving
Mar 06, 2024



This paper presents a novel multi-modal Multi-Object Tracking (MOT) algorithm for self-driving cars that combines camera and LiDAR data. Camera frames are processed with a state-of-the-art 3D object detector, whereas classical clustering techniques are used to process LiDAR observations. The proposed MOT algorithm comprises a three-step association process, an Extended Kalman filter for estimating the motion of each detected dynamic obstacle, and a track management phase. The EKF motion model requires the current measured relative position and orientation of the observed object and the longitudinal and angular velocities of the ego vehicle as inputs. Unlike most state-of-the-art multi-modal MOT approaches, the proposed algorithm does not rely on maps or knowledge of the ego global pose. Moreover, it uses a 3D detector exclusively for cameras and is agnostic to the type of LiDAR sensor used. The algorithm is validated both in simulation and with real-world data, with satisfactory results.