 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR-CARLA: High-Fidelity Sensor Simulations with Interchangeable Dynamics for Autonomous Racing
Jun 11, 2025Autonomous racing has emerged as a crucial testbed for autonomous driving algorithms, necessitating a simulation environment for both vehicle dynamics and sensor behavior. Striking the right balance between vehicle dynamics and sensor accuracy is crucial for pushing vehicles to their performance limits. However, autonomous racing developers often face a trade-off between accurate vehicle dynamics and high-fidelity sensor simulations. This paper introduces R-CARLA, an enhancement of the CARLA simulator that supports holistic full-stack testing, from perception to control, using a single system. By seamlessly integrating accurate vehicle dynamics with sensor simulations, opponents simulation as NPCs, and a pipeline for creating digital twins from real-world robotic data, R-CARLA empowers researchers to push the boundaries of autonomous racing development. Furthermore, it is developed using CARLA's rich suite of sensor simulations. Our results indicate that incorporating the proposed digital-twin framework into R-CARLA enables more realistic full-stack testing, demonstrating a significant reduction in the Sim-to-Real gap of car dynamics simulation by 42% and by 82% in the case of sensor simulation across various testing scenarios.
DTR: Delaunay Triangulation-based Racing for Scaled Autonomous Racing
May 30, 2025Reactive controllers for autonomous racing avoid the computational overhead of full ee-Think-Act autonomy stacks by directly mapping sensor input to control actions, eliminating the need for localization and planning. A widely used reactive strategy is FTG, which identifies gaps in LiDAR range measurements and steers toward a chosen one. While effective on fully bounded circuits, FTG fails in scenarios with incomplete boundaries and is prone to driving into dead-ends, known as FTG-traps. This work presents DTR, a reactive controller that combines Delaunay triangulation, from raw LiDAR readings, with track boundary segmentation to extract a centerline while systematically avoiding FTG-traps. Compared to FTG, the proposed method achieves lap times that are 70\% faster and approaches the performance of map-dependent methods. With a latency of 8.95 ms and CPU usage of only 38.85\% on the robot's OBC, DTR is real-time capable and has been successfully deployed and evaluated in field experiments.
Drive Fast, Learn Faster: On-Board RL for High Performance Autonomous Racing
May 12, 2025Autonomous racing presents unique challenges due to its non-linear dynamics, the high speed involved, and the critical need for real-time decision-making under dynamic and unpredictable conditions. Most traditional Reinforcement Learning (RL) approaches rely on extensive simulation-based pre-training, which faces crucial challenges in transfer effectively to real-world environments. This paper introduces a robust on-board RL framework for autonomous racing, designed to eliminate the dependency on simulation-based pre-training enabling direct real-world adaptation. The proposed system introduces a refined Soft Actor-Critic (SAC) algorithm, leveraging a residual RL structure to enhance classical controllers in real-time by integrating multi-step Temporal-Difference (TD) learning, an asynchronous training pipeline, and Heuristic Delayed Reward Adjustment (HDRA) to improve sample efficiency and training stability. The framework is validated through extensive experiments on the F1TENTH racing platform, where the residual RL controller consistently outperforms the baseline controllers and achieves up to an 11.5 % reduction in lap times compared to the State-of-the-Art (SotA) with only 20 min of training. Additionally, an End-to-End (E2E) RL controller trained without a baseline controller surpasses the previous best results with sustained on-track learning. These findings position the framework as a robust solution for high-performance autonomous racing and a promising direction for other real-time, dynamic autonomous systems.
TinyCenterSpeed: Efficient Center-Based Object Detection for Autonomous Racing
Apr 11, 2025Perception within autonomous driving is nearly synonymous with Neural Networks (NNs). Yet, the domain of autonomous racing is often characterized by scaled, computationally limited robots used for cost-effectiveness and safety. For this reason, opponent detection and tracking systems typically resort to traditional computer vision techniques due to computational constraints. This paper introduces TinyCenterSpeed, a streamlined adaptation of the seminal CenterPoint method, optimized for real-time performance on 1:10 scale autonomous racing platforms. This adaptation is viable even on OBCs powered solely by Central Processing Units (CPUs), as it incorporates the use of an external Tensor Processing Unit (TPU). We demonstrate that, compared to Adaptive Breakpoint Detector (ABD), the current State-of-the-Art (SotA) in scaled autonomous racing, TinyCenterSpeed not only improves detection and velocity estimation by up to 61.38% but also supports multi-opponent detection and estimation. It achieves real-time performance with an inference time of just 7.88 ms on the TPU, significantly reducing CPU utilization 8.3-fold.
GP-enhanced Autonomous Drifting Framework using ADMM-based iLQR
Mar 14, 2025Autonomous drifting is a complex challenge due to the highly nonlinear dynamics and the need for precise real-time control, especially in uncertain environments. To address these limitations, this paper presents a hierarchical control framework for autonomous vehicles drifting along general paths, primarily focusing on addressing model inaccuracies and mitigating computational challenges in real-time control. The framework integrates Gaussian Process (GP) regression with an Alternating Direction Method of Multipliers (ADMM)-based iterative Linear Quadratic Regulator (iLQR). GP regression effectively compensates for model residuals, improving accuracy in dynamic conditions. ADMM-based iLQR not only combines the rapid trajectory optimization of iLQR but also utilizes ADMM's strength in decomposing the problem into simpler sub-problems. Simulation results demonstrate the effectiveness of the proposed framework, with significant improvements in both drift trajectory tracking and computational efficiency. Our approach resulted in a 38$\%$ reduction in RMSE lateral error and achieved an average computation time that is 75$\%$ lower than that of the Interior Point OPTimizer (IPOPT).
RLPP: A Residual Method for Zero-Shot Real-World Autonomous Racing on Scaled Platforms
Jan 28, 2025



Autonomous racing presents a complex environment requiring robust controllers capable of making rapid decisions under dynamic conditions. While traditional controllers based on tire models are reliable, they often demand extensive tuning or system identification. RL methods offer significant potential due to their ability to learn directly from interaction, yet they typically suffer from the Sim-to-Reall gap, where policies trained in simulation fail to perform effectively in the real world. In this paper, we propose RLPP, a residual RL framework that enhances a PP controller with an RL-based residual. This hybrid approach leverages the reliability and interpretability of PP while using RL to fine-tune the controller's performance in real-world scenarios. Extensive testing on the F1TENTH platform demonstrates that RLPP improves lap times by up to 6.37 %, closing the gap to the SotA methods by more than 52 % and providing reliable performance in zero-shot real-world deployment, overcoming key challenges associated with the Sim-to-Real transfer and reducing the performance gap from simulation to reality by more than 8-fold when compared to the baseline RL controller. The RLPP framework is made available as an open-source tool, encouraging further exploration and advancement in autonomous racing research. The code is available at: www.github.com/forzaeth/rlpp.
Learning-Based On-Track System Identification for Scaled Autonomous Racing in Under a Minute
Nov 26, 2024



Accurate tire modeling is crucial for optimizing autonomous racing vehicles, as state-of-the-art (SotA) model-based techniques rely on precise knowledge of the vehicle's parameters. Yet, system identification in dynamic racing conditions is challenging due to varying track and tire conditions. Traditional methods require extensive operational ranges, often impractical in racing scenarios. Machine learning (ML)-based methods, while improving performance, struggle with generalization and depend on accurate initialization. This paper introduces a novel on-track system identification algorithm, incorporating a neural network (NN) for error correction, which is then employed for traditional system identification with virtually generated data. Crucially, the process is iteratively reapplied, with tire parameters updated at each cycle, leading to notable improvements in accuracy in tests on a scaled vehicle. Experiments show that it is possible to learn a tire model without prior knowledge with only 30 seconds of driving data and 3 seconds of training time. This method demonstrates greater one-step prediction accuracy than the baseline nonlinear least squares (NLS) method under noisy conditions, achieving a 3.3x lower root mean square error (RMSE), and yields tire models with comparable accuracy to traditional steady-state system identification. Furthermore, unlike steady-state methods requiring large spaces and specific experimental setups, the proposed approach identifies tire parameters directly on a race track in dynamic racing environments.
Predictive Spliner: Data-Driven Overtaking in Autonomous Racing Using Opponent Trajectory Prediction
Oct 07, 2024



Head-to-head racing against opponents is a challenging and emerging topic in the domain of autonomous racing. We propose Predictive Spliner, a data-driven overtaking planner that learns the behavior of opponents through Gaussian Process (GP) regression, which is then leveraged to compute viable overtaking maneuvers in future sections of the racing track. Experimentally validated on a 1:10 scale autonomous racing platform using Light Detection and Ranging (LiDAR) information to perceive the opponent, Predictive Spliner outperforms State-of-the-Art (SotA) algorithms by overtaking opponents at up to 83.1% of its own speed, being on average 8.4% faster than the previous best-performing method. Additionally, it achieves an average success rate of 84.5%, which is 47.6% higher than the previous best-performing method. The method maintains computational efficiency with a Central Processing Unit (CPU) load of 22.79% and a computation time of 8.4 ms, evaluated on a Commercial off-the-Shelf (CotS) Intel i7-1165G7, making it suitable for real-time robotic applications. These results highlight the potential of Predictive Spliner to enhance the performance and safety of autonomous racing vehicles. The code for Predictive Spliner is available at: https://github.com/ForzaETH/predictive-spliner.
CR3DT: Camera-RADAR Fusion for 3D Detection and Tracking
Mar 22, 2024



Accurate detection and tracking of surrounding objects is essential to enable self-driving vehicles. While Light Detection and Ranging (LiDAR) sensors have set the benchmark for high performance, the appeal of camera-only solutions lies in their cost-effectiveness. Notably, despite the prevalent use of Radio Detection and Ranging (RADAR) sensors in automotive systems, their potential in 3D detection and tracking has been largely disregarded due to data sparsity and measurement noise. As a recent development, the combination of RADARs and cameras is emerging as a promising solution. This paper presents Camera-RADAR 3D Detection and Tracking (CR3DT), a camera-RADAR fusion model for 3D object detection, and Multi-Object Tracking (MOT). Building upon the foundations of the State-of-the-Art (SotA) camera-only BEVDet architecture, CR3DT demonstrates substantial improvements in both detection and tracking capabilities, by incorporating the spatial and velocity information of the RADAR sensor. Experimental results demonstrate an absolute improvement in detection performance of 5.3% in mean Average Precision (mAP) and a 14.9% increase in Average Multi-Object Tracking Accuracy (AMOTA) on the nuScenes dataset when leveraging both modalities. CR3DT bridges the gap between high-performance and cost-effective perception systems in autonomous driving, by capitalizing on the ubiquitous presence of RADAR in automotive applications.
ForzaETH Race Stack -- Scaled Autonomous Head-to-Head Racing on Fully Commercial off-the-Shelf Hardware
Mar 18, 2024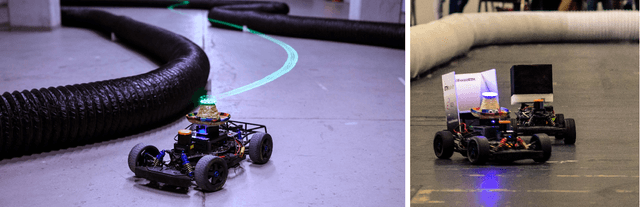
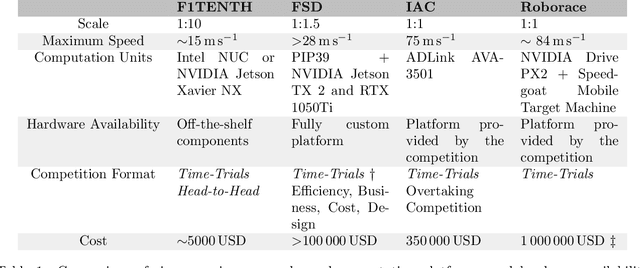
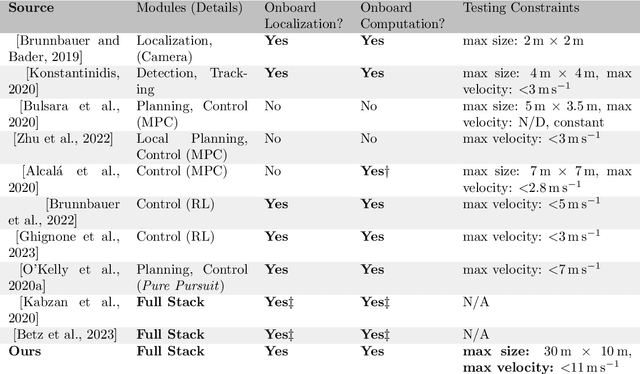
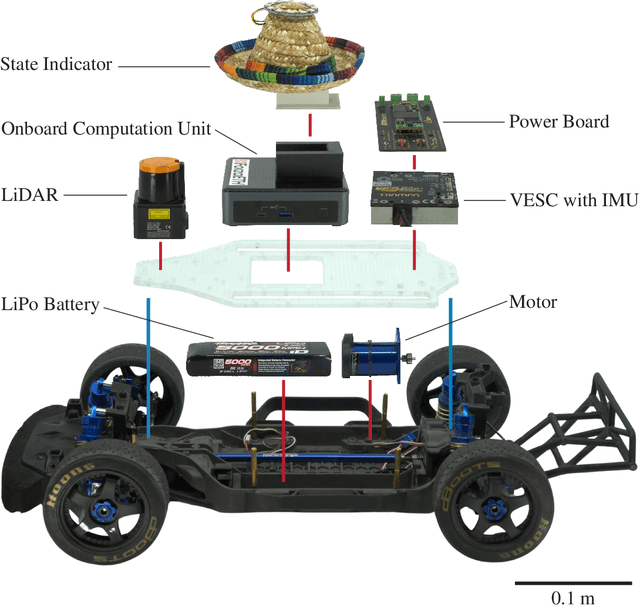
Autonomous racing in robotics combines high-speed dynamics with the necessity for reliability and real-time decision-making. While such racing pushes software and hardware to their limits, many existing full-system solutions necessitate complex, custom hardware and software, and usually focus on Time-Trials rather than full unrestricted Head-to-Head racing, due to financial and safety constraints. This limits their reproducibility, making advancements and replication feasible mostly for well-resourced laboratories with comprehensive expertise in mechanical, electrical, and robotics fields. Researchers interested in the autonomy domain but with only partial experience in one of these fields, need to spend significant time with familiarization and integration. The ForzaETH Race Stack addresses this gap by providing an autonomous racing software platform designed for F1TENTH, a 1:10 scaled Head-to-Head autonomous racing competition, which simplifies replication by using commercial off-the-shelf hardware. This approach enhances the competitive aspect of autonomous racing and provides an accessible platform for research and development in the field. The ForzaETH Race Stack is designed with modularity and operational ease of use in mind, allowing customization and adaptability to various environmental conditions, such as track friction and layout. Capable of handling both Time-Trials and Head-to-Head racing, the stack has demonstrated its effectiveness, robustness, and adaptability in the field by winning the official F1TENTH international competition multiple times.