 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoop Closure from Two Views: Revisiting PGO for Scalable Trajectory Estimation through Monocular Priors
Mar 20, 2025



(Visual) Simultaneous Localization and Mapping (SLAM) remains a fundamental challenge in enabling autonomous systems to navigate and understand large-scale environments. Traditional SLAM approaches struggle to balance efficiency and accuracy, particularly in large-scale settings where extensive computational resources are required for scene reconstruction and Bundle Adjustment (BA). However, this scene reconstruction, in the form of sparse pointclouds of visual landmarks, is often only used within the SLAM system because navigation and planning methods require different map representations. In this work, we therefore investigate a more scalable Visual SLAM (VSLAM) approach without reconstruction, mainly based on approaches for two-view loop closures. By restricting the map to a sparse keyframed pose graph without dense geometry representations, our '2GO' system achieves efficient optimization with competitive absolute trajectory accuracy. In particular, we find that recent advancements in image matching and monocular depth priors enable very accurate trajectory optimization from two-view edges. We conduct extensive experiments on diverse datasets, including large-scale scenarios, and provide a detailed analysis of the trade-offs between runtime, accuracy, and map size. Our results demonstrate that this streamlined approach supports real-time performance, scales well in map size and trajectory duration, and effectively broadens the capabilities of VSLAM for long-duration deployments to large environments.
ForzaETH Race Stack -- Scaled Autonomous Head-to-Head Racing on Fully Commercial off-the-Shelf Hardware
Mar 18, 2024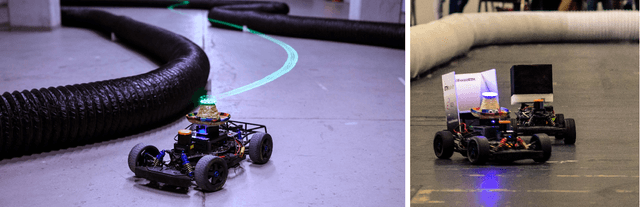
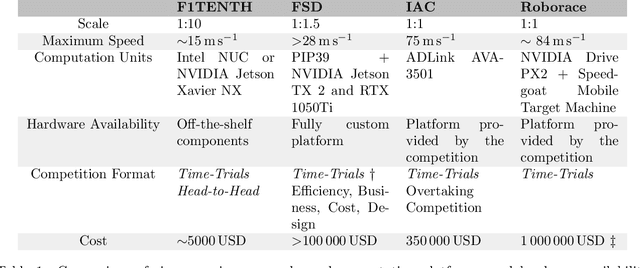
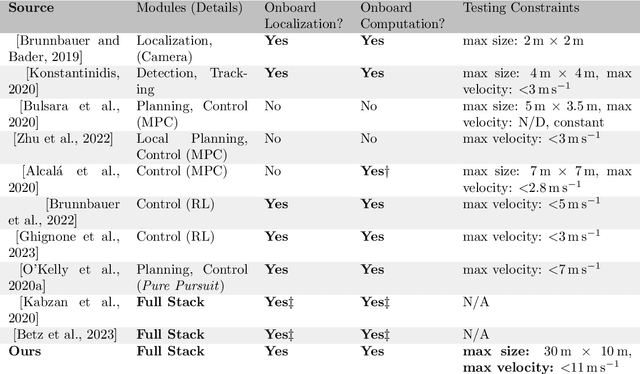
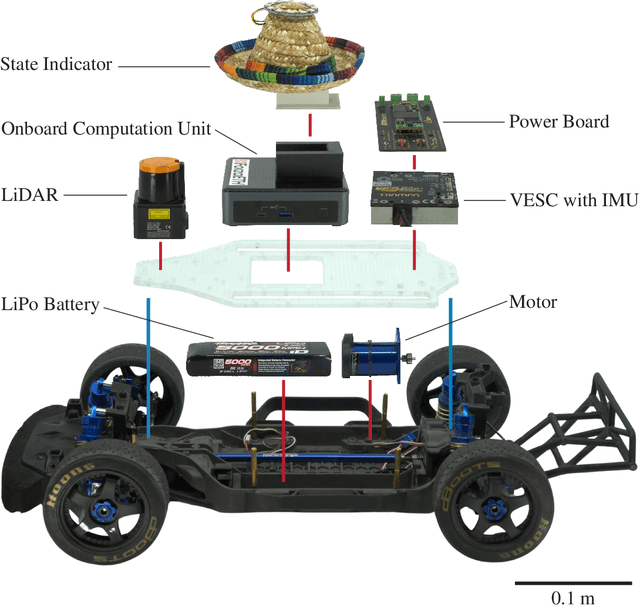
Autonomous racing in robotics combines high-speed dynamics with the necessity for reliability and real-time decision-making. While such racing pushes software and hardware to their limits, many existing full-system solutions necessitate complex, custom hardware and software, and usually focus on Time-Trials rather than full unrestricted Head-to-Head racing, due to financial and safety constraints. This limits their reproducibility, making advancements and replication feasible mostly for well-resourced laboratories with comprehensive expertise in mechanical, electrical, and robotics fields. Researchers interested in the autonomy domain but with only partial experience in one of these fields, need to spend significant time with familiarization and integration. The ForzaETH Race Stack addresses this gap by providing an autonomous racing software platform designed for F1TENTH, a 1:10 scaled Head-to-Head autonomous racing competition, which simplifies replication by using commercial off-the-shelf hardware. This approach enhances the competitive aspect of autonomous racing and provides an accessible platform for research and development in the field. The ForzaETH Race Stack is designed with modularity and operational ease of use in mind, allowing customization and adaptability to various environmental conditions, such as track friction and layout. Capable of handling both Time-Trials and Head-to-Head racing, the stack has demonstrated its effectiveness, robustness, and adaptability in the field by winning the official F1TENTH international competition multiple times.
Robustness Evaluation of Localization Techniques for Autonomous Racing
Jan 15, 2024


This work introduces SynPF, an MCL-based algorithm tailored for high-speed racing environments. Benchmarked against Cartographer, a state-of-the-art pose-graph SLAM algorithm, SynPF leverages synergies from previous particle-filtering methods and synthesizes them for the high-performance racing domain. Our extensive in-field evaluations reveal that while Cartographer excels under nominal conditions, it struggles when subjected to wheel-slip, a common phenomenon in a racing scenario due to varying grip levels and aggressive driving behaviour. Conversely, SynPF demonstrates robustness in these challenging conditions and a low-latency computation time of 1.25 ms on on-board computers without a GPU. Using the F1TENTH platform, a 1:10 scaled autonomous racing vehicle, this work not only highlights the vulnerabilities of existing algorithms in high-speed scenarios, tested up until 7.6 m/s, but also emphasizes the potential of SynPF as a viable alternative, especially in deteriorating odometry conditions.